�����̉Ȋw�Z�p���q�������ɑ����B�@�W���j���{�@��JRO��
��619-0237 ���s�{���y�S���ؒ�����W����
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
�S�쓮�Ԃ̐���RECRUIT
���߂ɁI�I
�@����R�[�X�A��{�R�[�X�Ŏg�p���Ă������{�b�g�̎ԑ͕̂W���̕����g���Ă��܂������A���悢�惍�{�J�b�v�W���j�A���ɎQ�����邱�Ƃ��l���Ĉȉ��̉ۑ������{�b�g��肪�K�v�ƂȂ�܂��B
�� ���{�J�b�v�W���j�A�F���X�L���[���Z�ŕK�v�Ƃ����\�� ��
�i�P�j�P�O���� �� �p�_�A���� �ۖ_ �i �����o���v �j�����z���邱�Ƃ��o���鎖�B
�@�@�@�@�W���̂R�֎Ԃ��A�S�֎Ԃ��L���ł���̂Ǝԗւ͑傫�������L���B
�i�Q�j���ꂫ�i �ܗk�}�� �j���A���C����ɎU�����Ă���B
�@�@�@�@���C�����o���s����ƂȂ�̂ŁA�Z���T�������X�|�b�g����L�p���o�ɕύX�����苗���ϓ��ɋ����Z��
�@�@�@�@�T�̑I�����K�v�B
�i�R�j�Q�T�x�̓o��₪��������A��̃X���[�v��ɂ������o���v������\��������܂��B
�@�@�@�@�o���ɂ́A���C�����L�����薳�������肵�܂��B
�@�@�@�@�ԑ̉�����������Ȃ��������K�v�Ȃ̂Əd�ʃo�����X���K�v�i�����Ή��j�ƂȂ�܂��B
�@�@�@�@���C���������ꍇ�́A���E�ǂ̋�������Ŏԑ̐�������܂��B
�i�S�j��Q�҂Ɍ����Ă��ʁi 360mL �T�C�Y�ʂɂ����荞�݂łP�X�O�� �j��ێ�����@�\
�@�@�@�@�`���b�N���O�@�\�ƁA�ʌ��o�@�\���K�v�ł��B
�i�P�j�p�[�c�̑I��
| �ԑ̂P�i�ڂ̃p�[�c | |
| �p�[�c�ʐ^�i�g��o���܂��j | ���@�@�@�� |
 |
���{�T�C�g���[�^�[ �^���@�@�@�@�F RA250100-58Y91 �M����@�@�@�F 100�F1 �g�p�d���@�@�F DC3 [V] ~ 6 [V] ���[�^��]���F 7000 [rpm] �N���g���N�@�F 174 [ g-cm ] �����דd���@�F 0.15 [ A ] �S���@�@�@�@�F 73 [ mm ] �ő咷�@�@�@�F ��27.5 [ mm ] �V���t�g���@�F 15mm ��[ 6 [mm ] M3 �V���t�g�a�@�F �� [ ���� ] ��t�J�o�[�㉺�A�~�߃r�X�A�X�v�����O�s���t |
 |
�s���^�C�v �U�p �n�u�Z�b�g �������Ȃ̂ŁA��������Œ�ł��܂��B ���[�^�W���ŕt���Ă���s���͎ア�̂ŁA���̕��i�Ɍ������܂��B |
 |
�^�C���z�C�[�� �f�U�C���őI��ł��������B |
 |
�X�[�p�[�X���b�N�^�C�� �Q�{ �Z�b�g 1/10 �l�쓮�EFF�E�c�[�����O�J�[�p ���̃^�C���ɂ́A�^�C���g���b�h�p�^�[�����L ��܂���B ���ׁ̈A���� ���ɏ���̃O���b�v�͂������� �����҂��č̗p���Ă��܂��B �i �ڒn�ʐς��傫�� �j |
 |
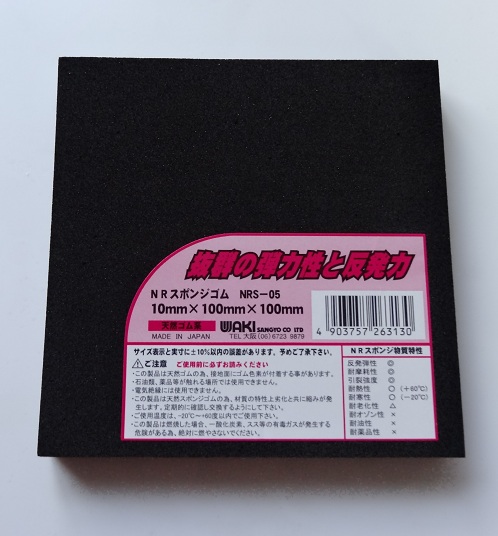
�C���i�[�X�|���W�E�n�[�h�Z�b�g 1/10 �l�쓮�EFF�E�c�[�����O�J�[�p �^�C�����̋�C�ɕς��N�b�V�����ނł��B �d���������������̃^�C���G���ɂ��ڒn�ʐϒቺ��h���܂��B �i���L�ɐ�����������܂��B�j �C���i�[�X�|���W�̓��� |
 |
�o�b�e���[�e�ʂ́A�����܂ł͕K�v����܂��� ������̗e�Ղ��i RC�p�W���i �j����I�肵�� �����B �[�d��͐�p�̕���K���g�p���ĉ������B �i ���E�����̉\�����L��܂��B�j 7.2 [ V ] 2200 [ mAh ] ���A�P�g�p |
 |
�o�b�e���[�T�C�Y�ɐ�܂��B�B �o�b�e���[�Œ�ނƂ��Ďg�p���܂��B |
| �ԑ̂Q�i�ڂ̃p�[�c | |
 |
�P�i�ڃv���[�g�ƂQ�i�ڃv���[�g�̊Ԃ̃X�[ �T�[�i�R�O�����j�W�{ CPU��ێ��p�Ƃ��āA�U�������̃X�[�T�[ ���S�{�g�p���܂��B |
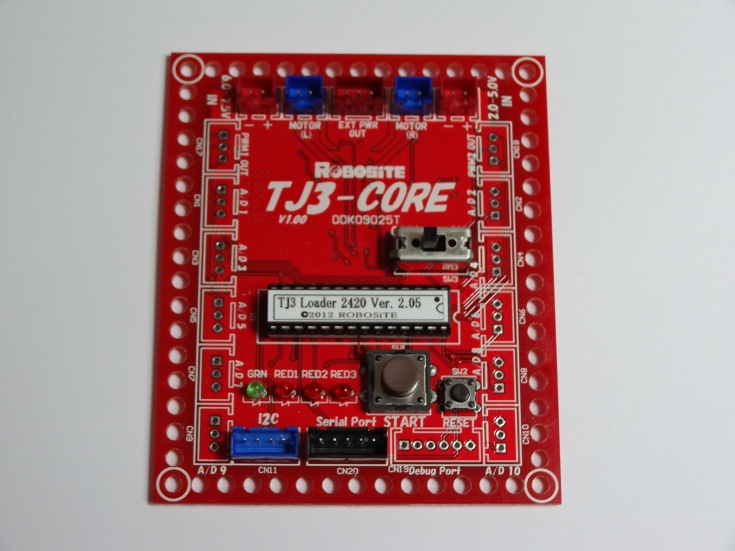 |
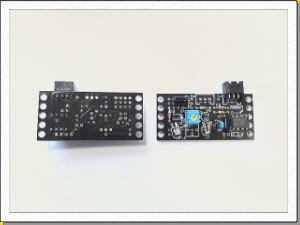
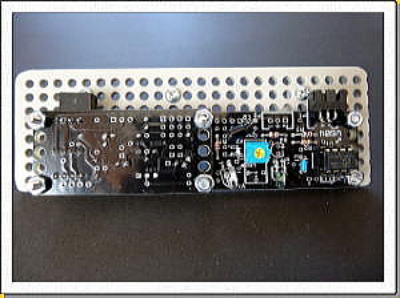
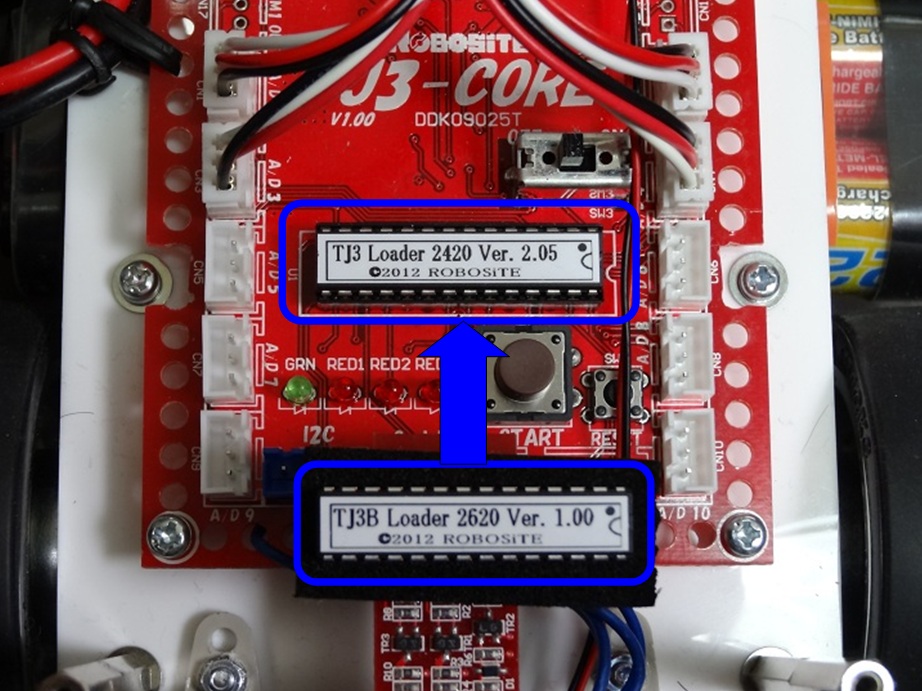
�}�C�R����i TJ3B-Core �j PIC�}�C�R���A���[�^�h���C�o�[������������ �Ă��܂��B �ʐ^�́ATJ3-Core �ł��� PIC �����ς� 18F2420�@�|���@18F2620 |
 |
PSD�Z���T ���{�b�g�Ə�Q���̊Ԃ̋����𑪒肷�邱�Ƃ� �o���܂��B �����A���o���Ɍ����i���Ďg���̂ŃX�|�b�g�� �P�_�Ԃ̋���������ł��܂��B |
 |
�����g�Z���T ���{�b�g�Ə�Q���̊Ԃ̋����𑪒肷�邱�Ƃ� �o���܂��B �����g���Ă鎖����L���͈͂̏�Q�������m�� ���܂��������͐��m�ɂ͑���o���܂���B |
 |
�V�^�̃��C���Z���T�ł��B ����A�����I�Ɏg�p���Ă݂܂��B �������� �P�D�����i�ڂŊm�F�ł���j �Q�D���o�͈͍͂L�� �R�D���o�����͈͂��傫�� �S�D�p���X�_���ŊO�����ɋ��� |
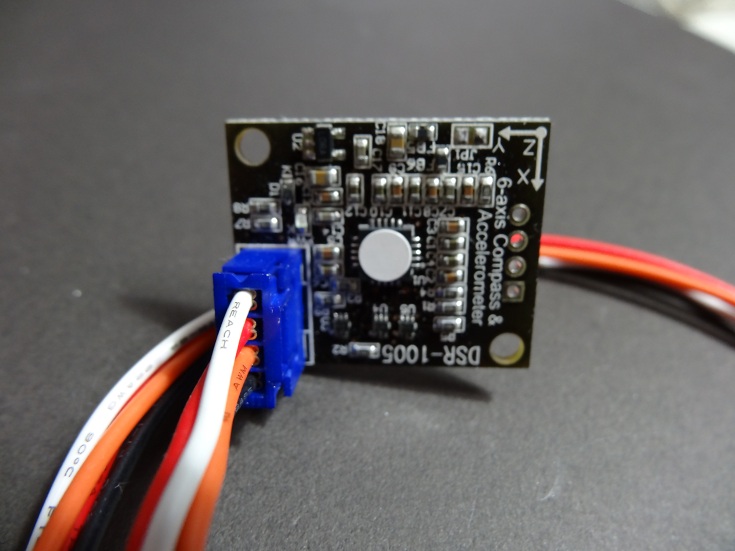 |
���@�\�d�q�R���p�X �������� �P�D���ʌ��o���x�������B �Q�D���[���A�s�b�`������ł���B �R�D���ȍ\���@�\�t�� |
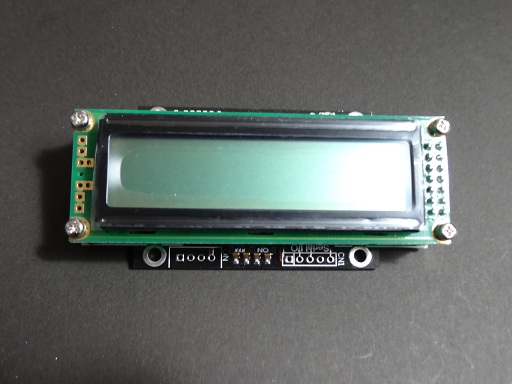 |
LCD�\���� �Z���T�f�[�^�[���m�F���܂��B |
�i�Q�j�^�C�������̑g��


�i�P�j�M�����[�^���̍����Ɍ����J���Ă��܂��B�i �s����}������ׂ̌��ł��B�j�����Ƀs����}�����܂��B
�@�@�@���[�^�[�ɕt���Ă���W���̃s���ł͂Ȃ��A��L�p�[�c�̃n�u�Z�b�g���̋����s�����g���Ă��������B
�i�Q�j�����Ƀn�u�����t���܂��B�a���L���������ɂ��Ď�t�܂��B


�i�R�j�z�C�[�������̂U�p�a�ɁA�n�u�i�U�p�j���������݂܂��B�i �ԑ̂��������Ă���ł��悢�B�j
�i�S�j�^�C���̓����ɃC���i�[�X�|���W���͂ߍ��݂܂��B

�i�T�j�^�C���z�C�[���Ƀ^�C�����͂ߍ��݂܂��B
���ۂ́A���[�^���ԑ̂Ɏ��t���Ă����L�̍�Ƃ�����������₷���ł�����t�菇�̎Q�l�Ƃ��ĉ������B
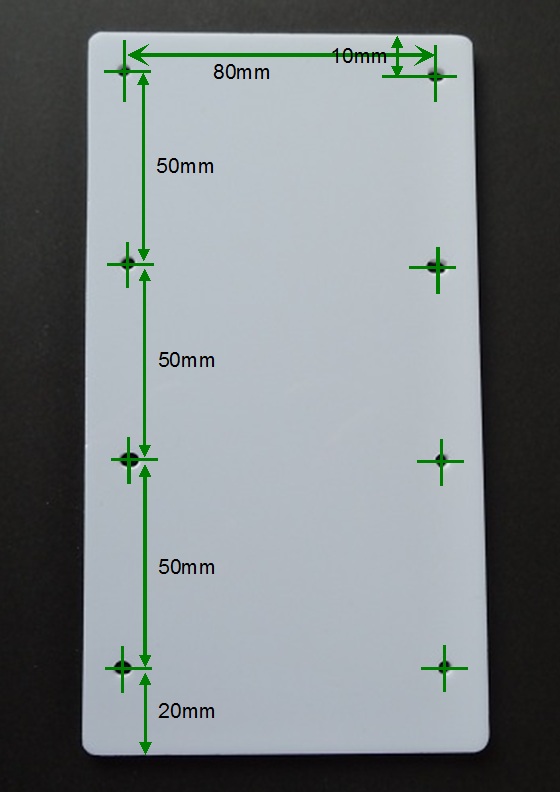
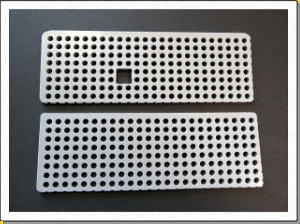
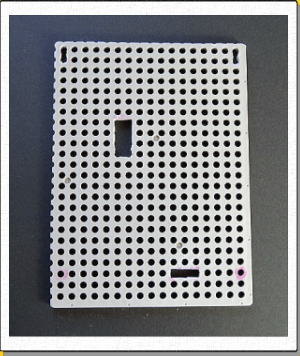
�i�R�j�ԑ̃x�[�X�̉��H���P�i�ځ��i �ꕔ�g��o���܂��B�j
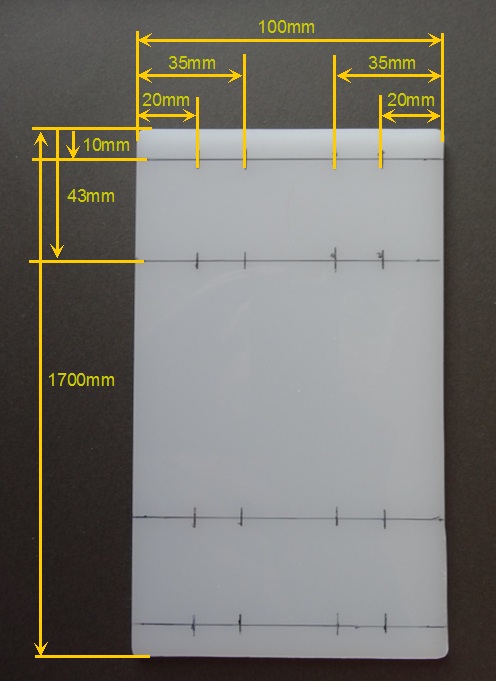
��y�ɉ��H���\�ȃA�N�������g���܂��B
�������ԑ̂̋��x���K�v�Ȃ̂ō��� �R���� ���̔��F�A�N��������L�̐��@�ɉ��H���܂��B

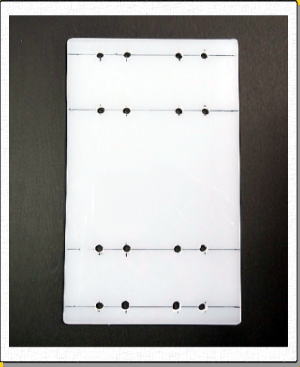
�i�S�j�ԑ̃x�[�X���H���Q�i�ځ��i �ꕔ�g��o���܂��B�j

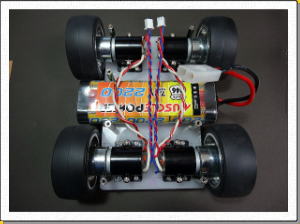
�@���[�^�͎��O���Ă��܂��B�i �Ō�Ɏ�t�܂��B�j
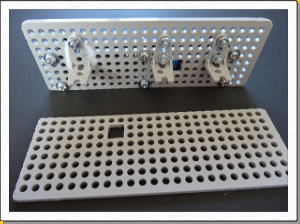
�@�X�[�T�[���W�{���܂����B


�Q�i�ڂ̔̐��@�ƁA�P�i�ڂ̔̒����Ƀo�b�e���[�ێ��x������lj��i�S�{�j���܂������A���������o�b�e���[�����܂��Ă��܂���B�����₷��ō���čL���܂����B�X�[�T�[�͂R�O�����̍����ł��B
����ƃo�b�e���[�����܂�܂����B
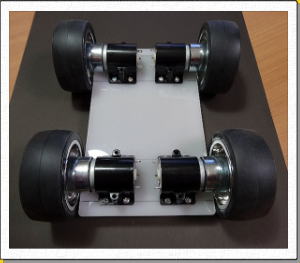
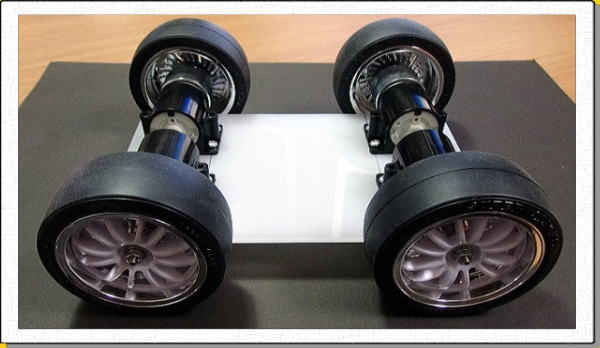
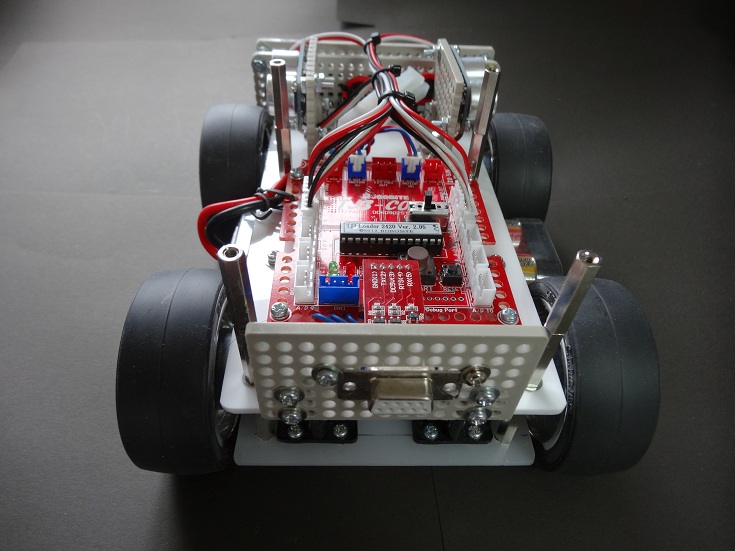
���[�^����t�A�Q�i�ڂ̃x�[�X�����t����R�O�����X�y�[�X���W���t������Ԃ̎ʐ^�ł��B
�ԗւƃo�b�e���[�Ƃ́A���~�����x�̃X�y�[�X��������܂���̂ŁA�������̈ʒu�W�͐��x���K�v�ł��B

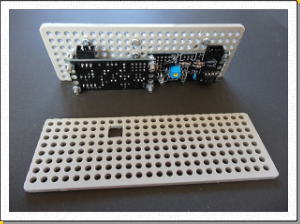
�@�Q�i�ڂ�PIC�}�C�R���{�[�h����t�܂��B
�@( TJ3B-Core �j
�@���̃{�[�h�ɂ́ARS232C-IF�@�\�͂���܂����A�h��
�@�C�u��H���Ȃ��㕔�ʐ^�̗l�ȃI�v�V��������g�p
�@���܂��B
�@���̃{�[�h���Œ肷��ׂɁA�R�l�N�^�Œ�{�[�h��
�@�쐬���܂��B
 �@��L���H������ׂɃ^�~�����̃��j�o�[�T���v���[�g
�@��L���H������ׂɃ^�~�����̃��j�o�[�T���v���[�g�@���g�p���Ă��܂��B
�@�i �g��o���܂��B�j
�@���H���@�́A�������킹�ŏ\���ł��B

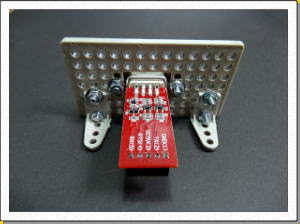
���ʏ�Q�����p�Ƃ��Ē����g�Z���T�����{�b�g�̍��E�Ɏ�t�܂��B
�v���[�g�����H���ăZ���T����t���܂��B�ʐ^�ł͌��Â炢�ł��� L �A���O�����t���܂��B
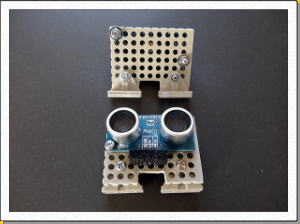
�V�^�̃��C���Z���T�������Ă݂܂��B
��T�C�Y�͑傫���Ȃ�܂����A�p�[�c�I���Ő������Ă���悤�ȑ傫�ȓ���������̂Ŏ������l�͂���܂��B
����́A�Q�̃��C���Z���T���g���Ă��X���[�X�ȃ��C���g���[�X�����݂����Ǝv���܂��B
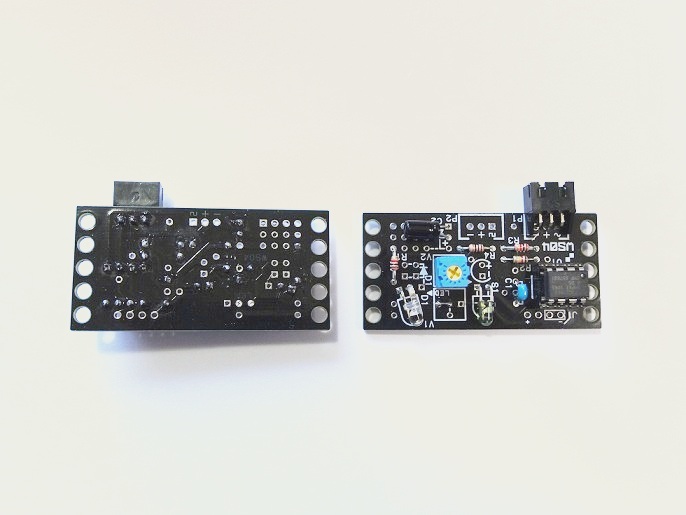
��L�̎ʐ^�ŏ����Ȍ�������܂����A����VR�����p�̌��ł��B�i ���x�����pVR �j
�@��̗��\���d�˂܂��B
�@�����ɔ������A�����������悤�ɂ��܂��B

�@�����܂ł̃p�[�c�����t����ׂɉ��H���Ă���
�@�Q�i�ڂ̔ɒlj������H���������킹�ōs���܂��B
�@�������ɂ���l�p�����́A�P�i�ڂɎ��t�������[�^
�@�̔z�����㕔�Ɏ����Ă��錊�ł��B
�@����ł͑g�ݗ��ĂĂ����܂��傤�B
�@�P�i�ڂ̃��[�^�z���i�m�C�Y�L���[�R���f���T�t���j
�@�o�b�e���[�z��
�@PIC���RS232C��A�����g�Z���T�A���C���Z���T
�@�e��Ɣz�����H���s���܂��傤�B
�@�P�i�ڂ̃��[�^�z�������Ċ��������Ă��܂��B
�@�m�C�Y�L���[�R���f���T�����t���Ă��܂��B
�@����ŁA�Q�i�ڂ����t���鏀�����o���܂����B
�@���L�ʐ^�́A�g��o���܂��B

�i�T�j�ԑ̃x�[�X���H���R�i�ځ�
���悢��ŏI�i�K�̂R�i�ڂ̐���ɓ���܂��B
�{���́A���̕����ɔ�Ў҂�z�肵���ʂ��^������`���b�L���O�@�\���ڂ���̂ł����A����̓Z���T�ƕ\����
�����t���鎖�Ƃ��܂��B
�@�����A�������܂��̂Ŋy���݂ɂ��ĉ������B
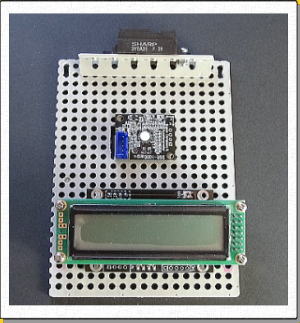
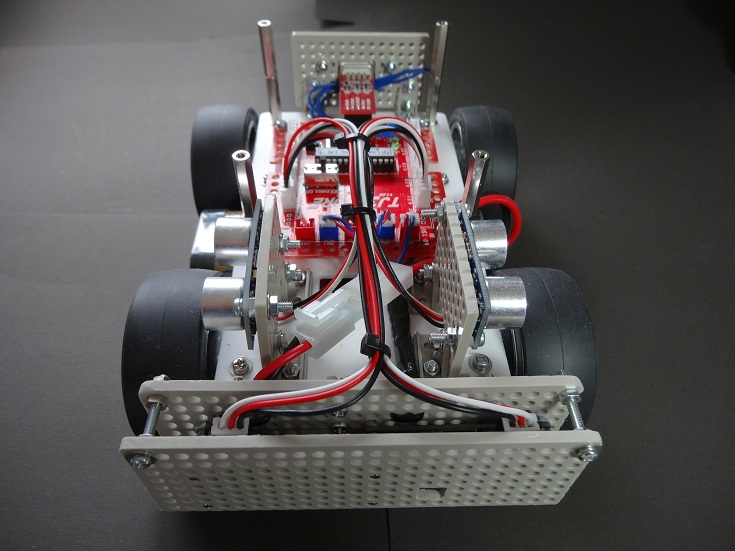
�v���[�g�O����PSD�Z���T�A�������ɑ��@�\�d�q�R���p�X�A�㕔��LCD�\��������t���܂��B
�����ӓ_��
�@ �W���C���Z���T�́A�n���C�ȊO�̎��C�̉e���i���[�^���j���Ȃ��悤���i�ɂ͋����V�[���h�����ăZ���T
�@ �������玥�C�̉e�����ɗ͖������悤�l���Ă��������B�i �����V�[���h�Ƃ��āA�A���~�z�C���ł��ǂ� �j
�A PSD�Z���T�͏o���邾�����ɋ߂���Q�������o�������̂łR�i�ڃv���[�g���Ⴍ���t���ĉ����ɌX����
�@ ���t���Ă��܂��B
�@ PSD�Z���T�́A�ߐڏ�Q�����o�͋��Ƃ��Ă��܂��i ����̃Z���T�ł͂P�O�����ȏォ�� �j�̂ŁA���{�b�g
�@ �̍Ő�[�ł͂Ȃ����������ɓ��ꍞ�ނ̂��R�c�ł��B
�B PSD�Z���T�̎�t���ʒu�́A�W���s�b�`�ł͂Ȃ��̂ŁA�v���[�g��̌��������h�����Ō��J�����K�v�ł��B
�C PSD�Z���T�ɕW���ŕt���Ă���P�[�u���̐F�ƃZ���T����̏o�͂̏o�������A�ʏ�ƈقȂ�̂Œ��ӂ��K�v
 �@�E�̃P�[�u�����A�Z���T�ɕt���Ă��镨
�@�E�̃P�[�u�����A�Z���T�ɕt���Ă��镨�@�����̃P�[�u�����A��ʓI�ȃP�[�u���ł��B
�@�F�z��͓����ł����A�Z���T�̃R�l�N�^���o�͂��ق�
�@���Ă��ĐM���o�͕��ɓd����������Č̏Ⴕ�܂��̂�
�@���������\���ɓǂ�Ŕz�����ĉ������B
�@�d���̃v���X�}�C�i�X���A���ɂȂ��Ă��܂��B
�@PSD������
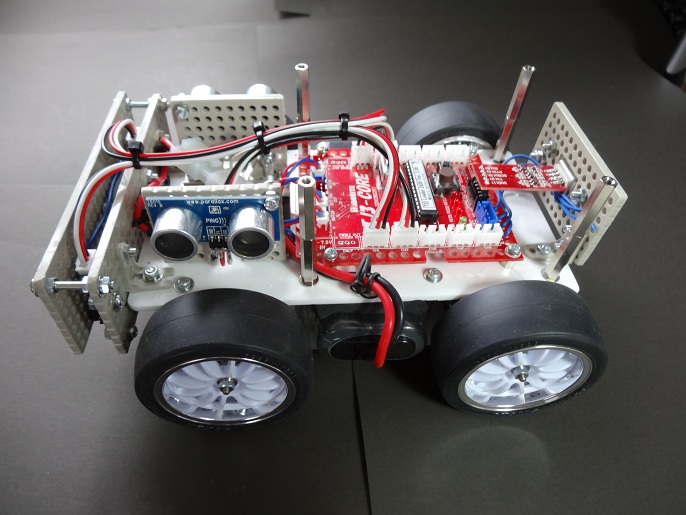
�ȏ�Ń��{�b�g���������܂����B
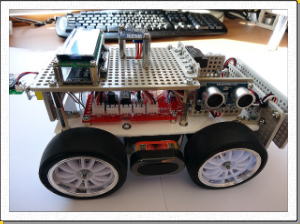
RS232C�̃R�l�N�^�Ɏh�����Ă���̂́A�f�[�^�[���K�[�p�������j�b�g�ł��B�i�ʂ̃R�[�i�[�ʼn�����܂��B�j
���̃��{�b�g���g�����\�t�g�E�G�A�́A��{�R�[�X�A���p�R�[�X�ŊJ�݂��Ă����܂��B
�� ��蔭���Ɖ������e ��
�i�P�j�d��������Ȃ��B
�@�@�@�o�b�e���[���R�l�N�^�[����O���ăe�X�^�[�œd���m�F�@�����@7.48 [ V ] ����d����������Ȃ��B
�@�A�@�ēx�o�b�e���[�����ɖ߂��āA���ׂẴ��[�^�A�Z���T�����O���ēd��������Ɛ���ł��B
�@�B�@���[�^�A�Z���T���P���ڑ����Ȃ���m�F���Ă����ƒ����g�Z���T�̂P�œd���d���� 0 [ V] �ƂȂ�B
�@�C�@PSD�Z���T���ڑ�����Ɠd���d���� 0 [ V ] �ƂȂ�B�����Ă��Ă������������B
�@�����g�Z���T����t���r�X�ɂ��d�����Z������Ă����B
�@�@�@�� �p�^�[������Œ茊�Ɛڋ߂��Ă��ĒZ�����₷�� ��
�@PSD�Z���T�̏o�͂̏o�����ʏ�ƈقȂ�d���̋ɐ������]���Ă����B
�@
�i�Q�j�p�\�R���ƃ��{�b�g�̒ʐM�s�
�@�@�@�p�\�R���̓V���A���EUSB�ϊ��P�[�u���� COM 4 �ŔF��
�@�A�@�p�\�R���́A���{�b�g��F�����Ȃ��B
�@�悭����ƃR�l�N�^�̃I�X�ƃ��X�̓y�A�i�ł͂Ȃ��傫�Ȍ��Ԃ�����s�����h�����Ă��Ȃ������B
�@�B�@�R�l�N�^�̈ʒu�������č����ւ��ēd������ɋ��������悤�ɂȂ������A�F���͂��Ȃ��B
�@C-Style���ATJ3B �p�ŁAPIC�}�C�R���� TJ3 �Ő��������Ă��Ȃ������B
�@PIC �� TJ3B �p�Ɍ����@�� 18F2420 �|�� 18F2620 ��
�i�R�j�Z���T�́A�ڑ�����ꏊ�����܂��Ă���B
�@�@�@���C���Z���T�́A�ڑ��̐����͂���܂���B
�@�A�@�����g�Z���T�́ACN10���珇�Ԃɐݒ肷��K�v������B
�@����́A�����C���Z���T���uCN1�v�ցA�E���C���Z���T���uCN2�v�ڑ�
�@�������g�Z���T���uCN9�v�ցA�E�����g�Z���T�́uCN10�v�ڑ����܂����B
���
LCD�ɂ́A�d���������uDownloading User Prg�E�E�E�E�v�ƕ\������܂��B����OK�B
Robot�������̑��@�\�\
�o�i�[�X�y�[�X
�����͂��
�@�@�@�W���j�A���{�b�g�N���u
��619-0237
���s�{���y�S���ؒ�����W����
TEL : 070-5263-2200
FAX : 0774-98-1100
mail : jun@kinet-tv.ne.jp