未来の科学技術を子供たちに託す。 ジュニロボ <JRO>
〒619-0237 京都府相楽郡精華町光台8丁目
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
基本コース用車両の製作RECRUIT
初めに!!
標準ロボット TJ3B に各種センサを搭載する改造を行っていきます。ここでは、ハードウエアの製作のみの記載とし、これを動かすソフトウエアに関しては「基本コース」「応用コ
ース」で記載していきますので参考にしてください。
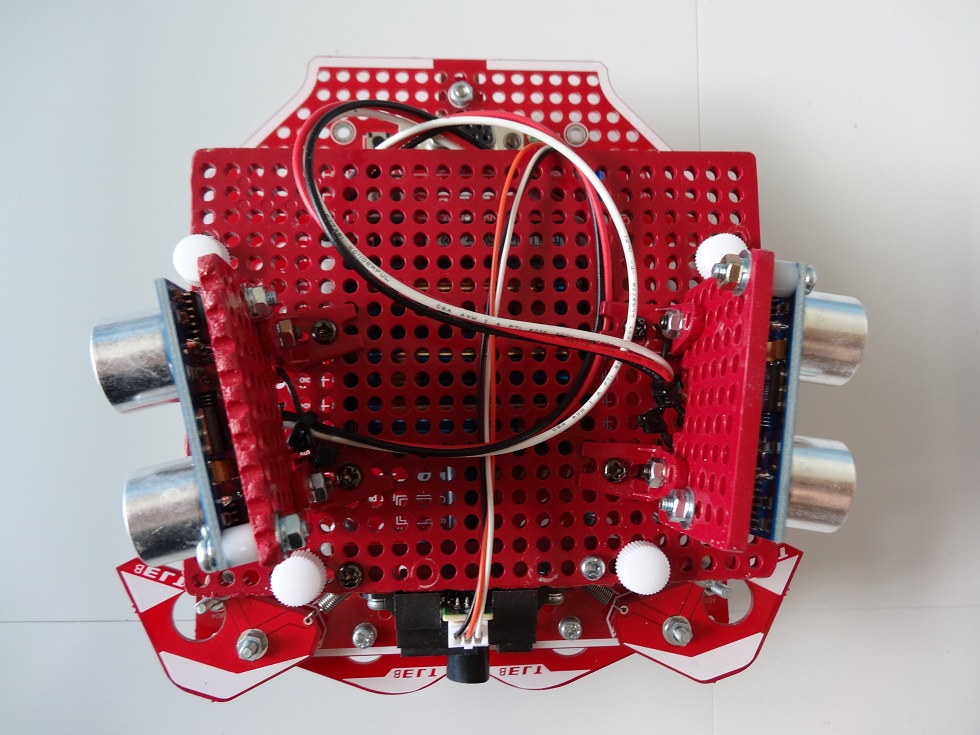
超音波センサとPSDセンサを取り付けて非接触で障害物回避を行うロボット製作
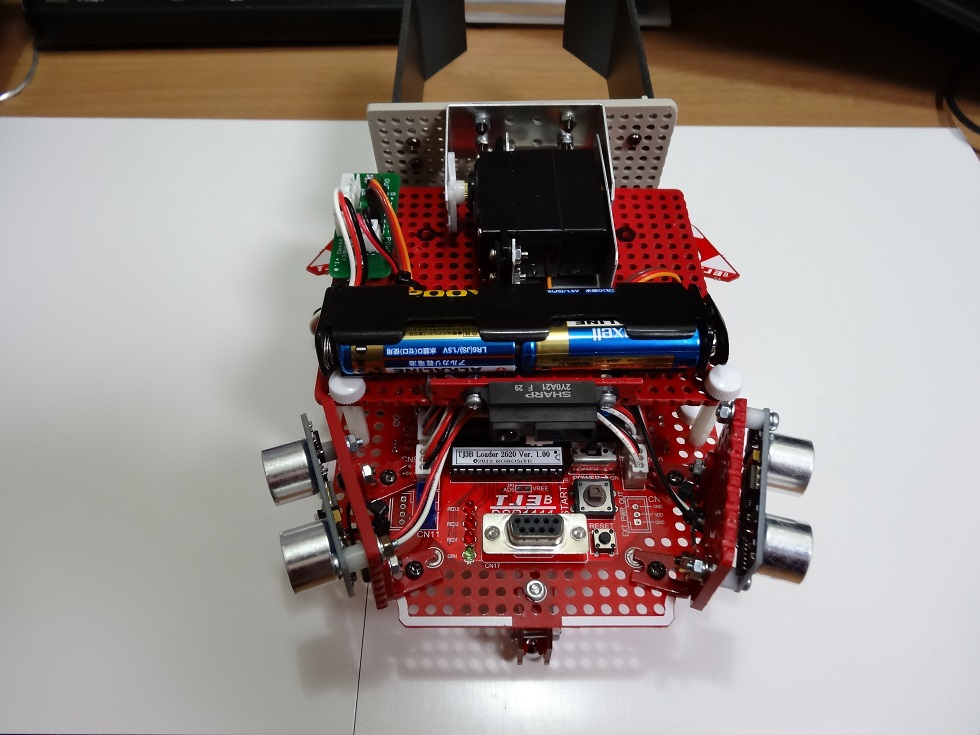
ロボットの完成写真< 参考写真 >

TJ3B の上部にユニバーサルプレートを置き、そこに超音波センサとPSDセンサを取付ます。
PSDセンサは原理上、10mm以内の距離測定が出来ないので、プレートの後部に取り付けます。
超音波センサは、数ミリから距離測定が出来るので、ロボットの先端に置いています。本来距離センサがあるの
で、標準で付いているタッチセンサは不要なので、取り外せばいいのですが今回はそのままにしておきます。
入出力用コネクタの取付
PINGセンサ、PSDセンサの信号取込&電源供給用コネクタを半田付けします。TJ3Bのアナログ入力は10個の入り口がありますが、PING(超音波式距離センサ)は、CN10 ~ CN7までの
4個を接続できます。
PINGが1個の場合は CN10 に接続、2個の場合は CN10 と CN9 という様に、CN10から始める決まりがあり
ますので注意が必要です。
(拡大できます。)

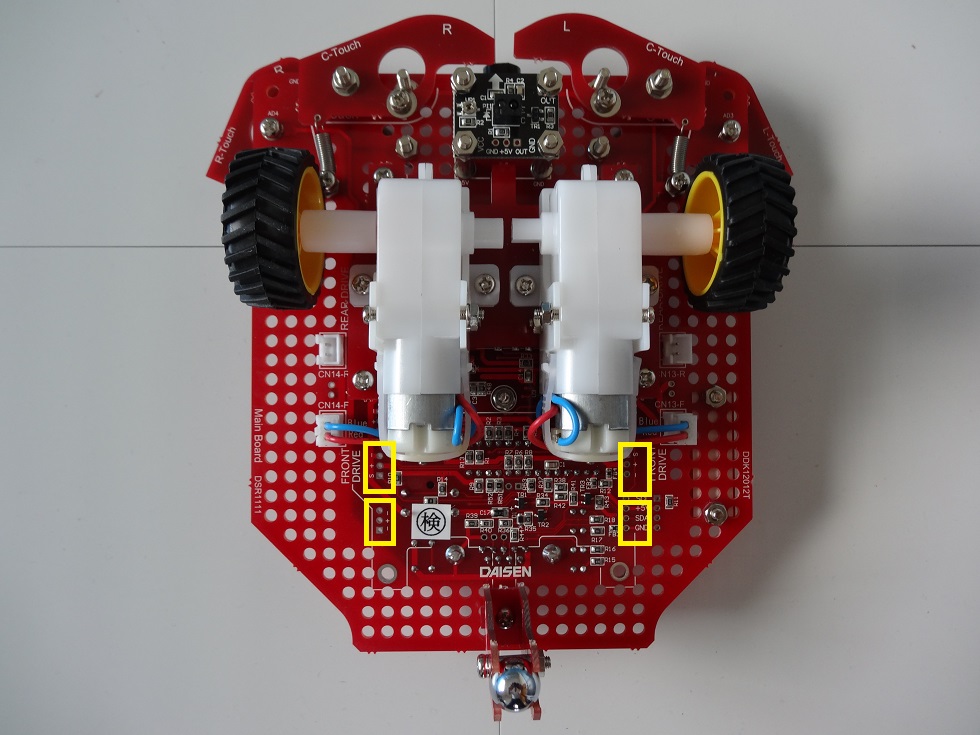
上記写真の黄色い枠部分にコネクタを半田付けします。( 写真の左側がロボット上部、右側が裏面です。)
使用するセンサは、PSDが1個、PINGが2個の合計3個ですが、コネクタは、CN7~ CN10 の4個を半田付
けしておきます。( 予備1個 )
3Pコネクタを、CN7 ~ CN10 に4個付けました。
写真は、接写で撮影した為、歪が出て歪んでいますが
実際は真っすぐに付いています。
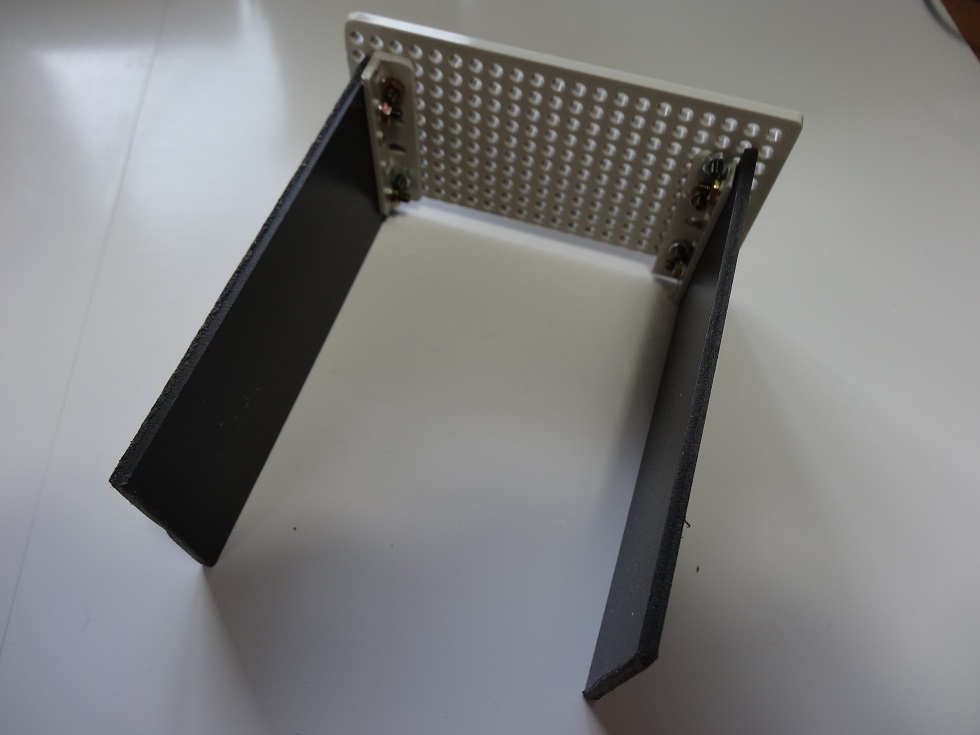
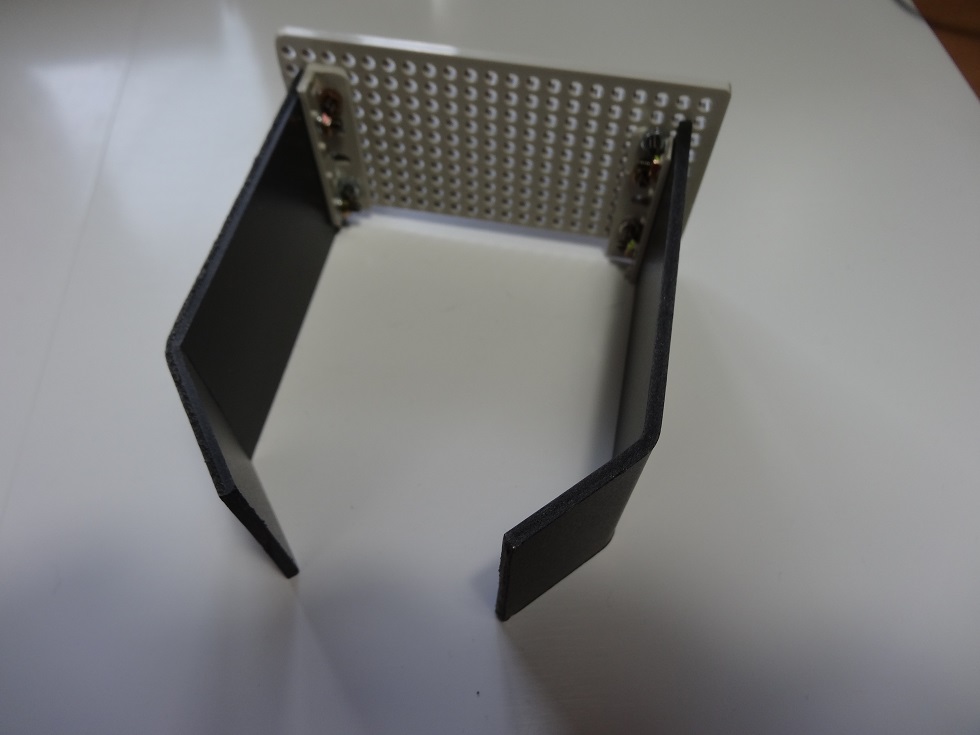
ユニバーサルプレートの加工
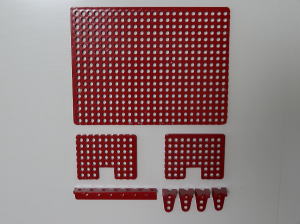 ユニバーサルプレートを左記の様に準備します。
ユニバーサルプレートを左記の様に準備します。大きい上部の基板は、センサーを取り付けるベース
基板です。( 赤色に塗装しています。)
中間の下部に溝が有る基板はPINGセンサを取り付ける
基板です。
下部左側は、PSDセンサ取付基板です。
下部右側は、中間基板(PING)の支えパーツです。
ユニバーサルプレートにセンサを取付
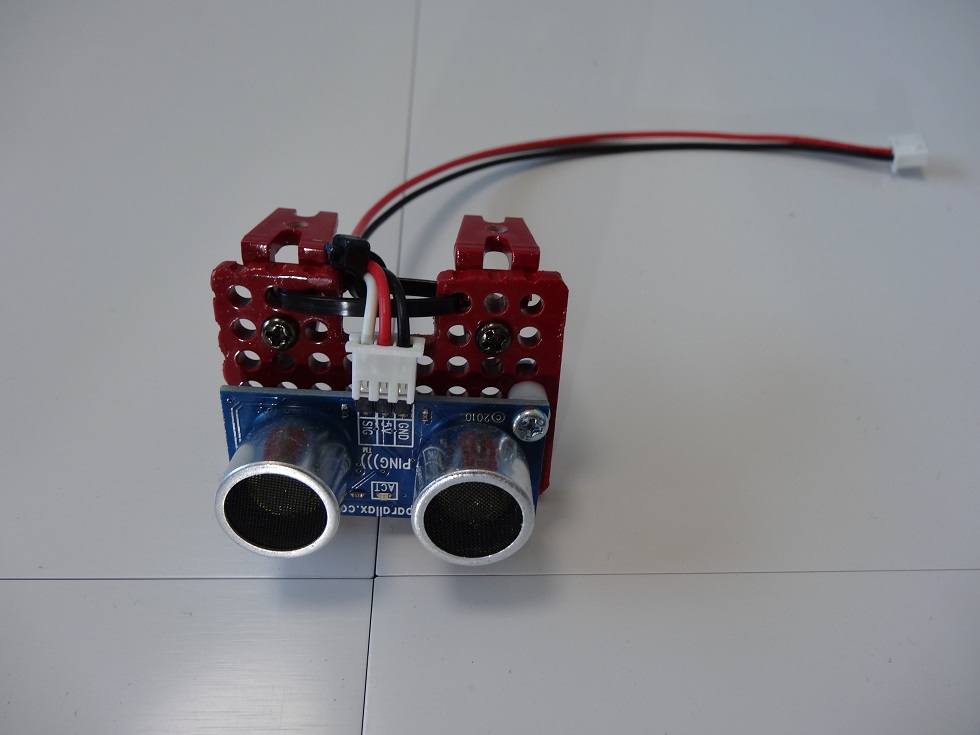
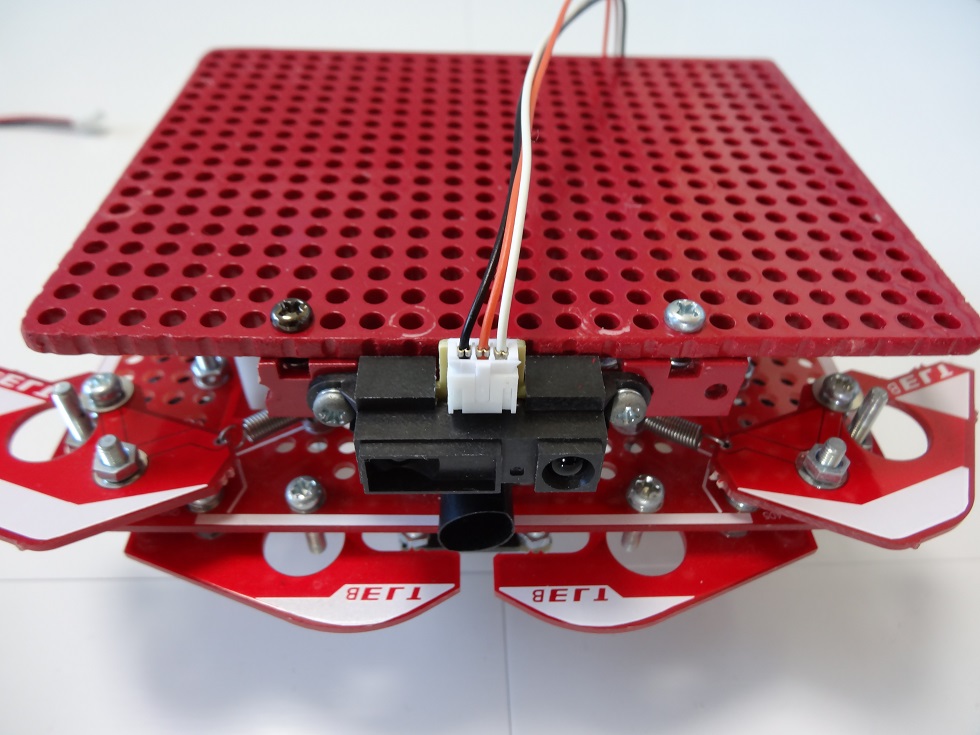
PINGとユニバーサルプレート間には、5mmの樹脂製スぺーサーを入れてください。( 短絡の可能性がある )
入出力コネクタは、ロックがないのでインシュロックして振動等で外れないように工夫して下さい。
PSDセンサは、上下どちらに取り付けてもOKです。( 写真は、コネクタ側を上にしました。)
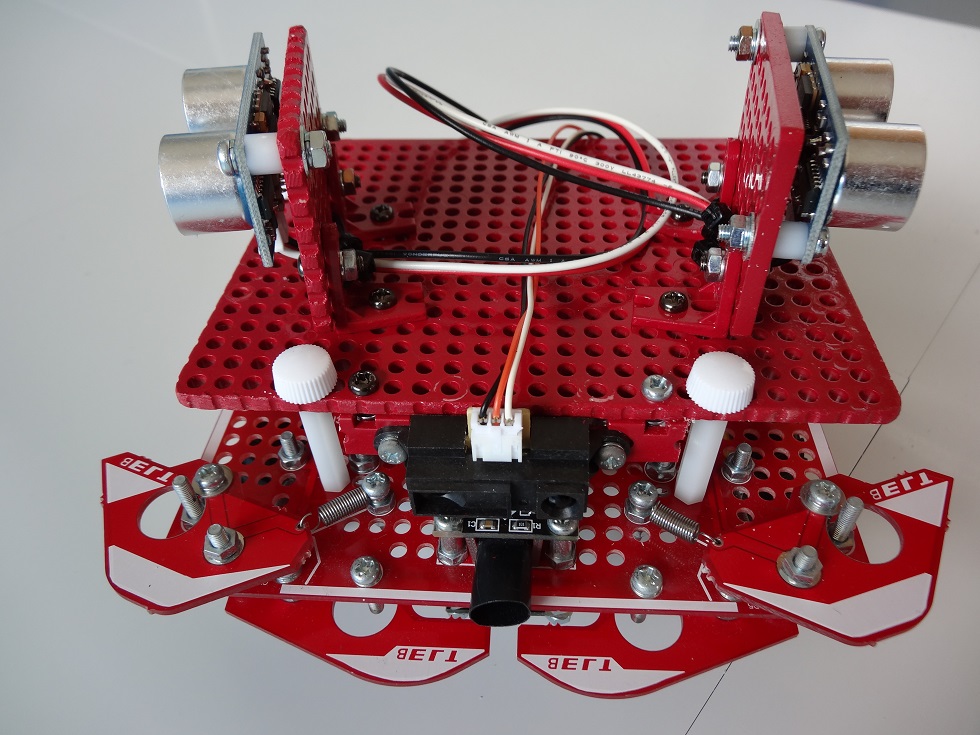
最後に止めネジで固定した写真です。( 上記写真では配線は固定していませんがインシュロックして下さい。)

配線は、PSDセンサは、CN7へ接続します。
PINGの左側はCN9へ接続します。
PINGの右側はCN10へ接続します。
プレート上の配線は、ぶらぶらしない様にインシュロ
ックして下さい。
競技に参加する子供たちに中には、このままで参加す
る人がいますが、接触不良や故障の原因となるので、
しっかりと固定するくせを付けましょう。
写真は、配線を解りやすくする為、ユニバーサルプレ
ートは、一度外しています。( 止めネジなし状態 )
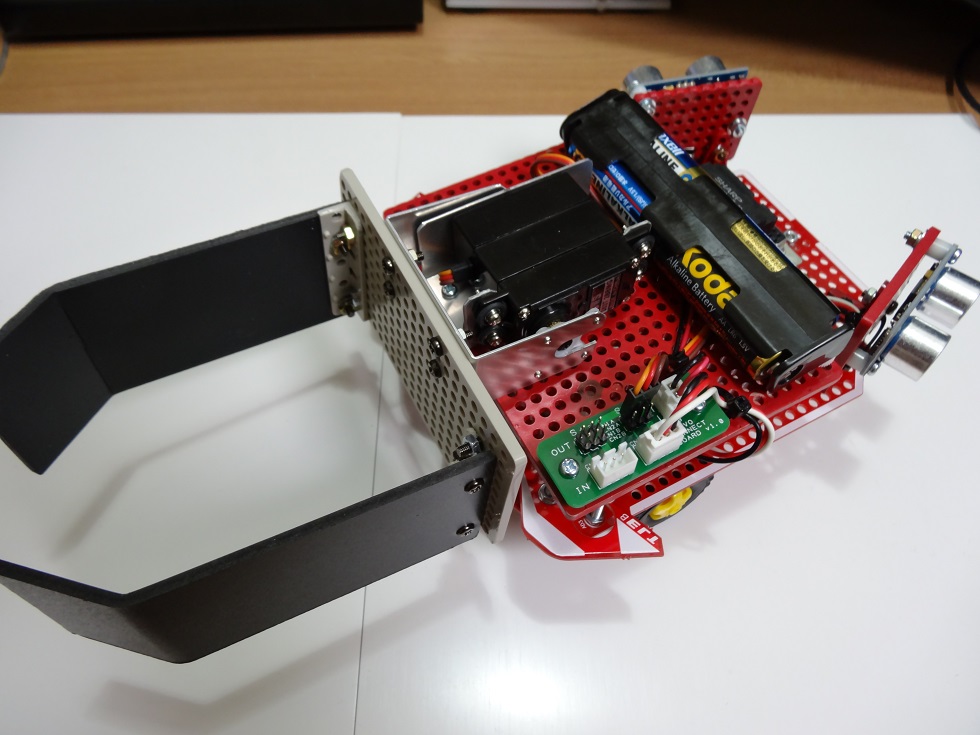
サーボに爪を付けたロボット製作
ロボットの完成写真< 参考写真 >
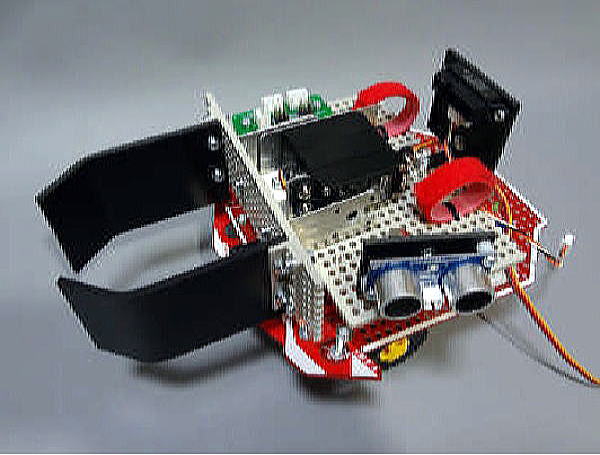
TJ3B の上部にユニバーサルプレートを置き、完成写真にあるサーボ機構を組立取付ます。
今回は、基本コースという事でサーボは1個だけを使って組み立て方、調整の仕方、ソフトの使い方を勉強して
いきます。サーボ機構は、チャッキングを上下に回転させる機構としました。
< 一部写真とは異なった取付を方法を取る場合があります。>
サーボブラケットの組立( 写真は拡大出来ます。)

まずは、サーボモーターのパッケージから、
サーボモーターを取り出します。( 下部 )
上部には、各種オプションパーツが(小物)が
入っているので無くさない様にして下さい。
出来れば小物入れにしまって置いてください 。


標準で付いている円形ホーンを取り外します。 ホーンを取り外した状態です。
中央のネジを外してから真上に引き上げます。


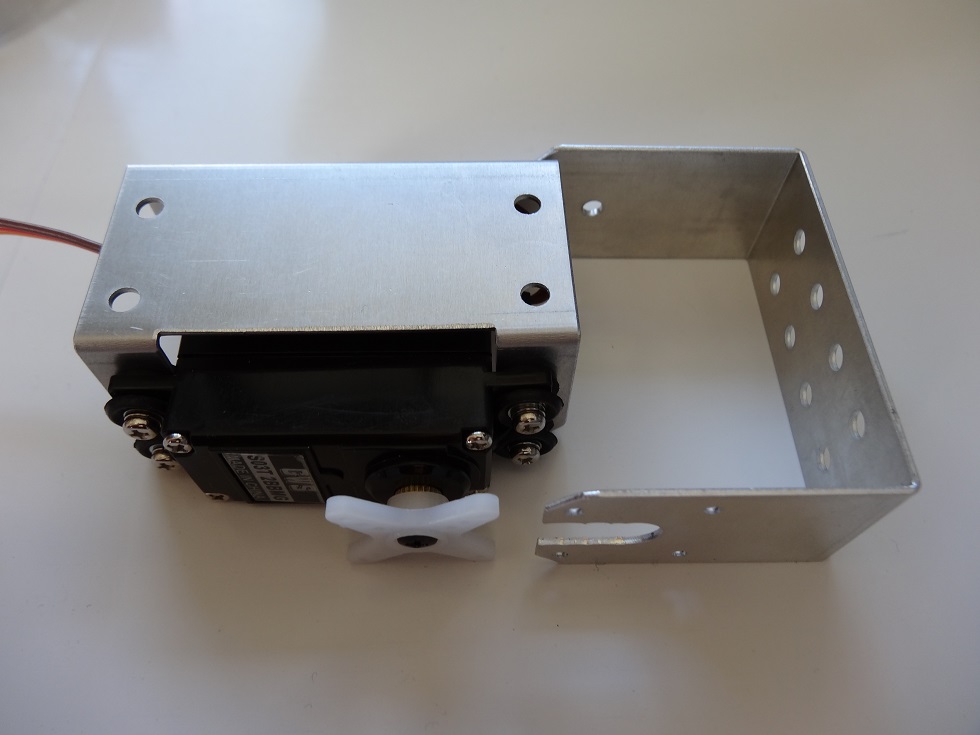
オプション・パーツの中の黒いゴムブッシュを、右写真の様に4つのネジ穴に取付ます。(4か所)


オプション・パーツの中のハトメを、ゴムブッシュ 次にサーボ・ブラケットを準備します。
の中央に差し込みます。(4か所) ( 教室で準備した加工品 )
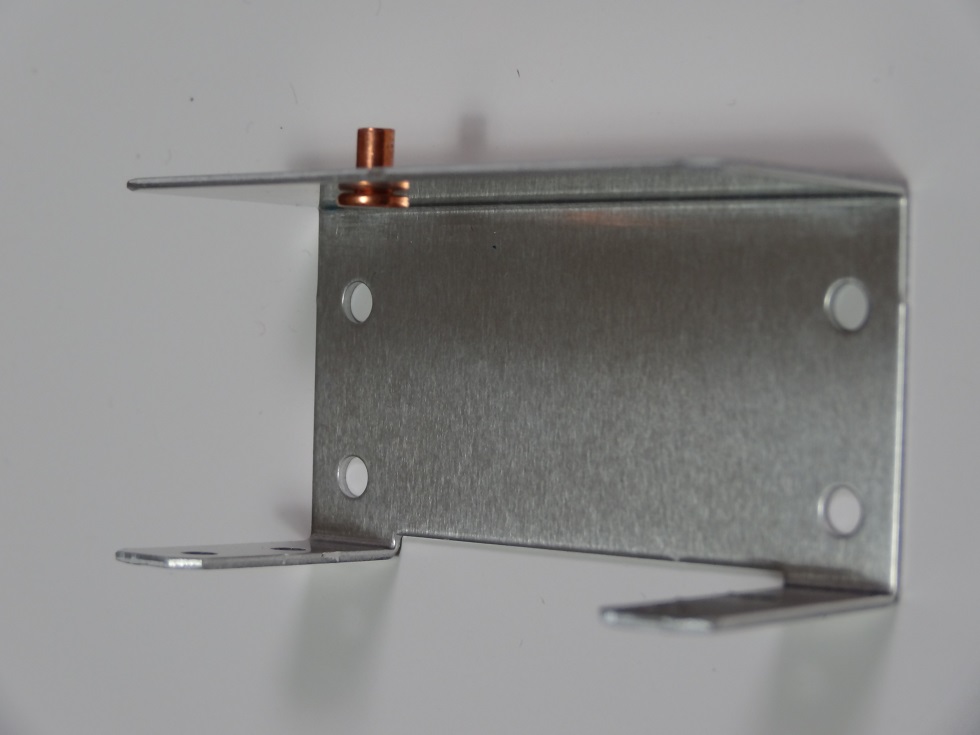

写真の位置の穴にリベットを差し込む。 サーボをブラケットに取り付ける。(4か所)
セムスビス M2.6mm x 10mm ワッシャ、ナット
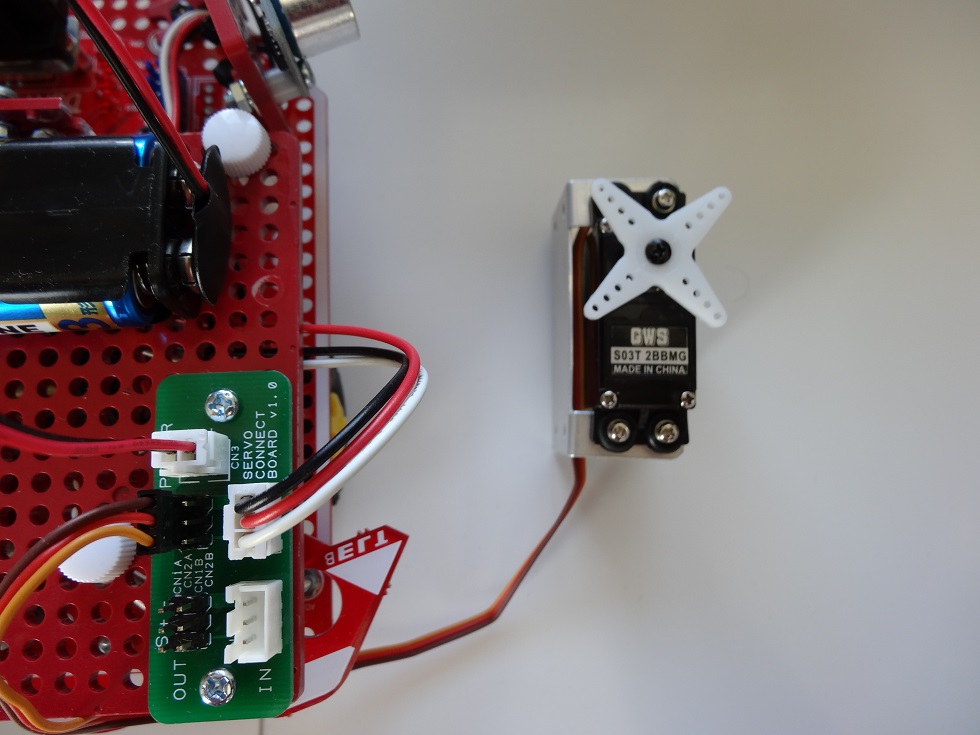
配線は、サーボの下を通します。
リベット側から見た写真です。
リベット位置とサーボモーターのシャフトは同軸上
になっているか確認して下さい。
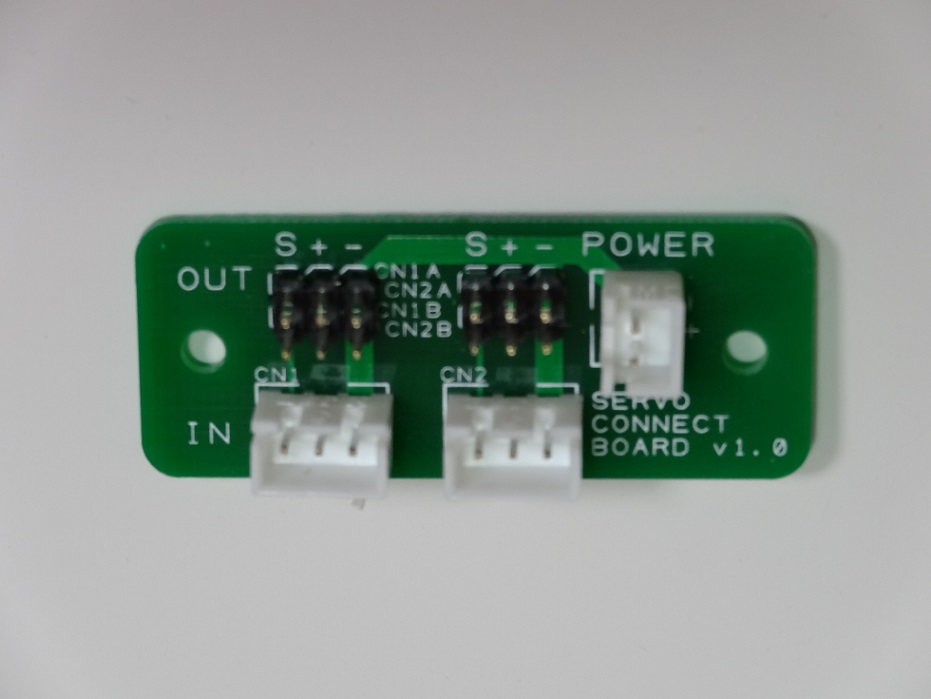
ここで、基板にコネクタを取付ます。
サーボ用( 黒色 )4個
マイコン用( 白色3P ) 2個
電源コネクタ( 白色2P )1個
今回使用するのは、この一部のみを使います。
最大4個のサーボが取り付けられます。
( 制御は2CH )
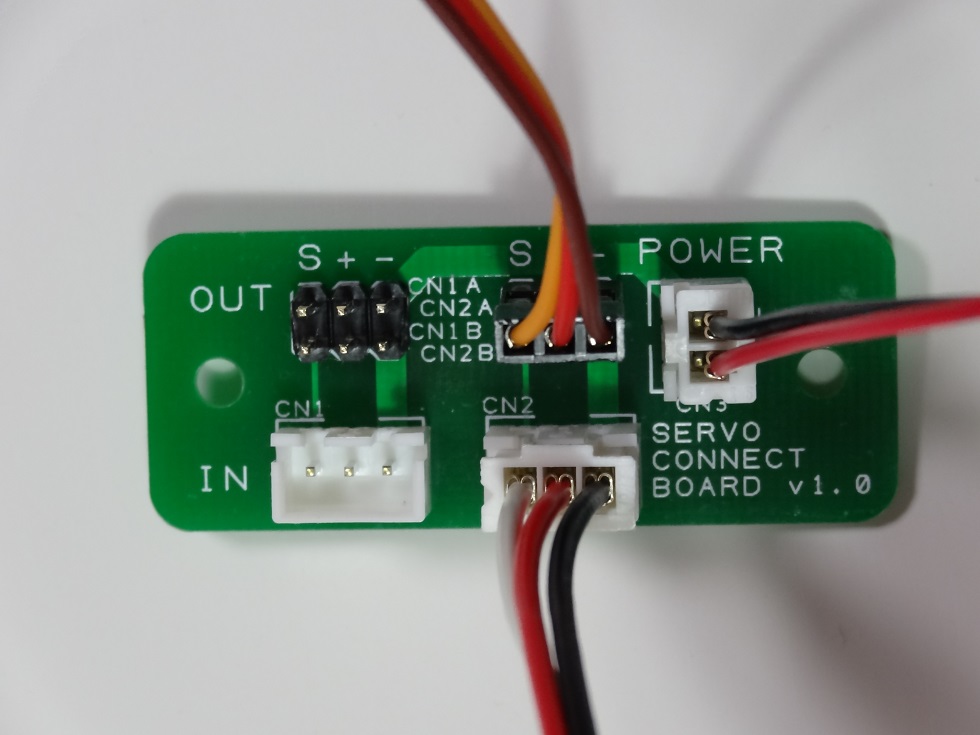
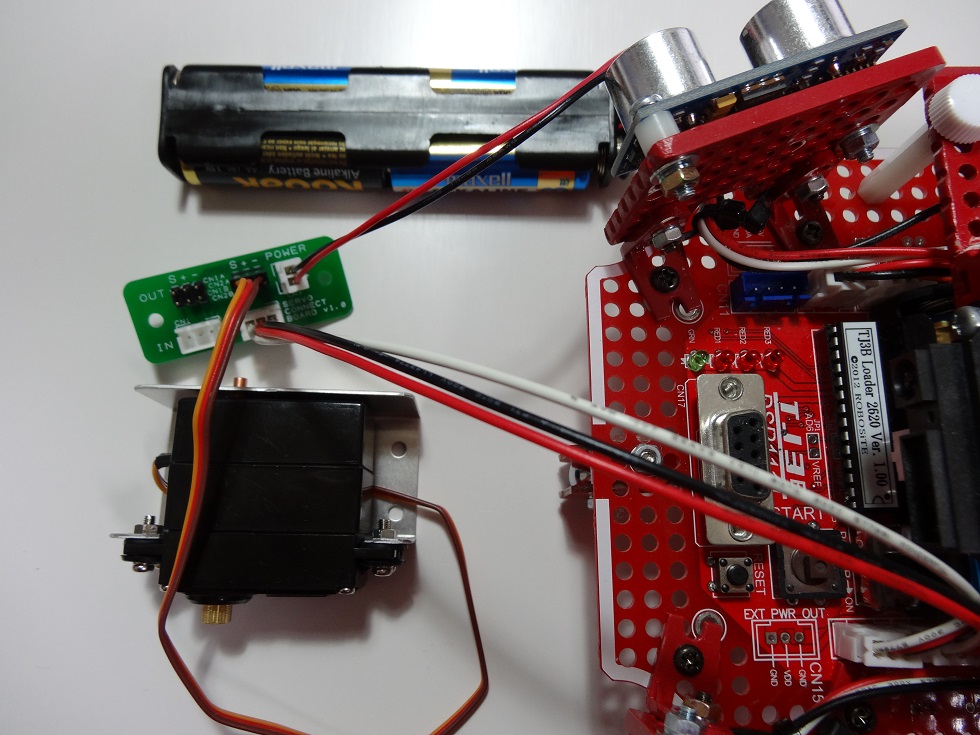
配線拡大写真 ロボット、サーボモーター、電池ホルダ配線
センサモニターで、サーボモーター位置を100% 100%位置で、小型十字ホーンを取付固定
に設定します。 センターのネジで固定します。(忘れる人がある)

小型十字ホーンを付けた状態( 2個製作 ) アーム金具をホーンに取付


アーム金具の裏側( リベットに差し込む ) アーム金具の表側( ホーンに 1.7mmネジで固定 )
アーム金具が取付られた状態です。 チャック板の加工例

チャック先端を机の角等で折り曲げる ボールを入れて調整します。
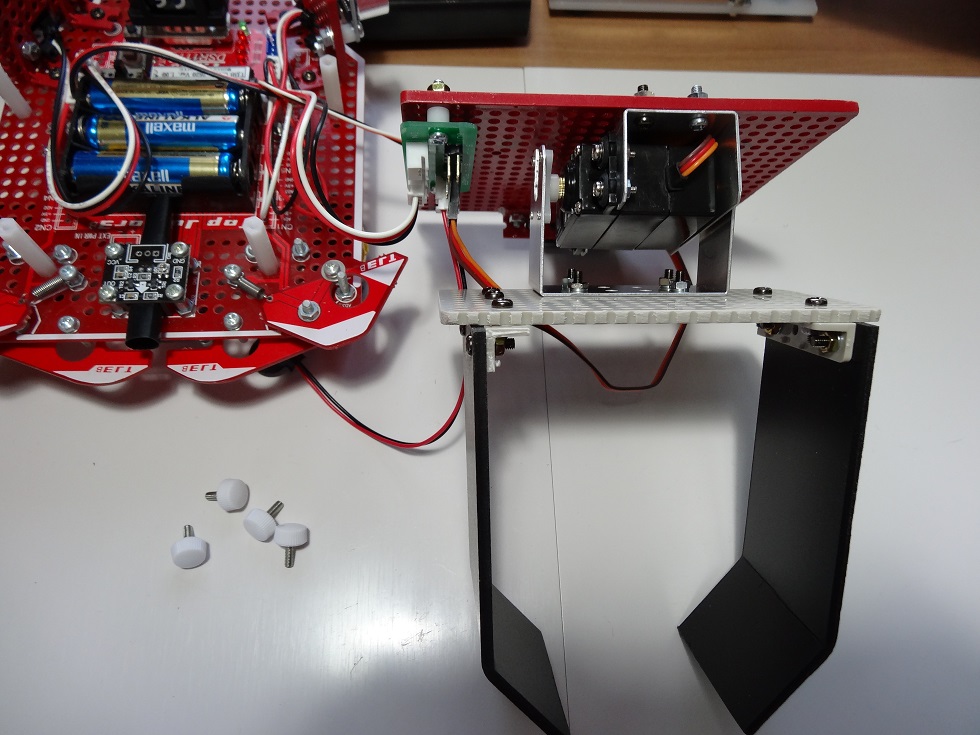
チャック部をブラケットに固定します。 ロボットに取り付けて完成です。
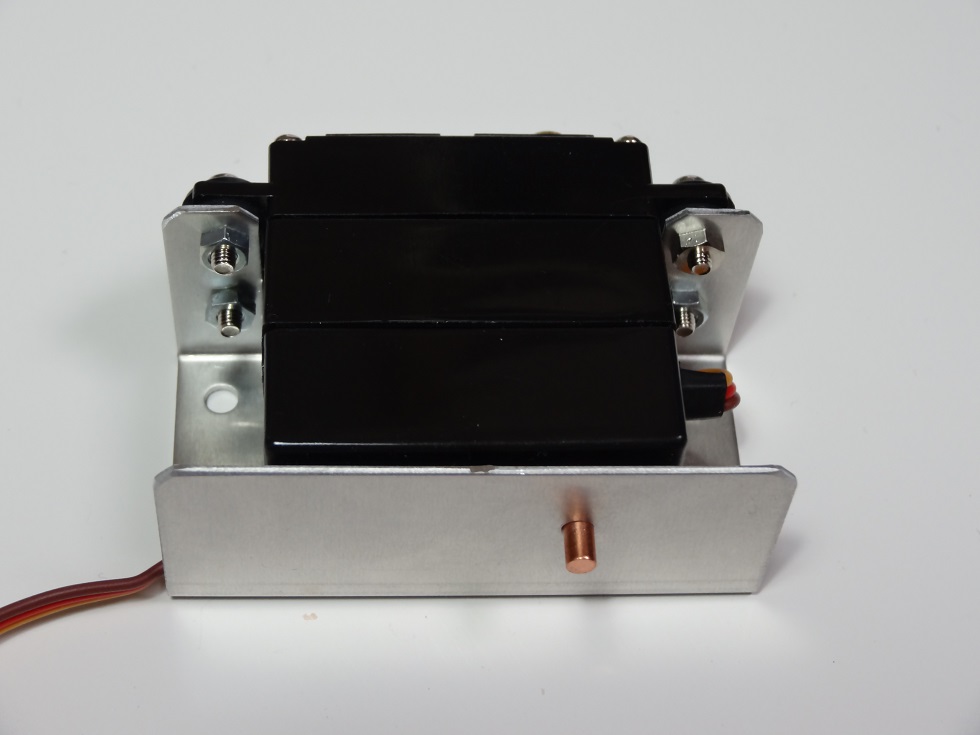
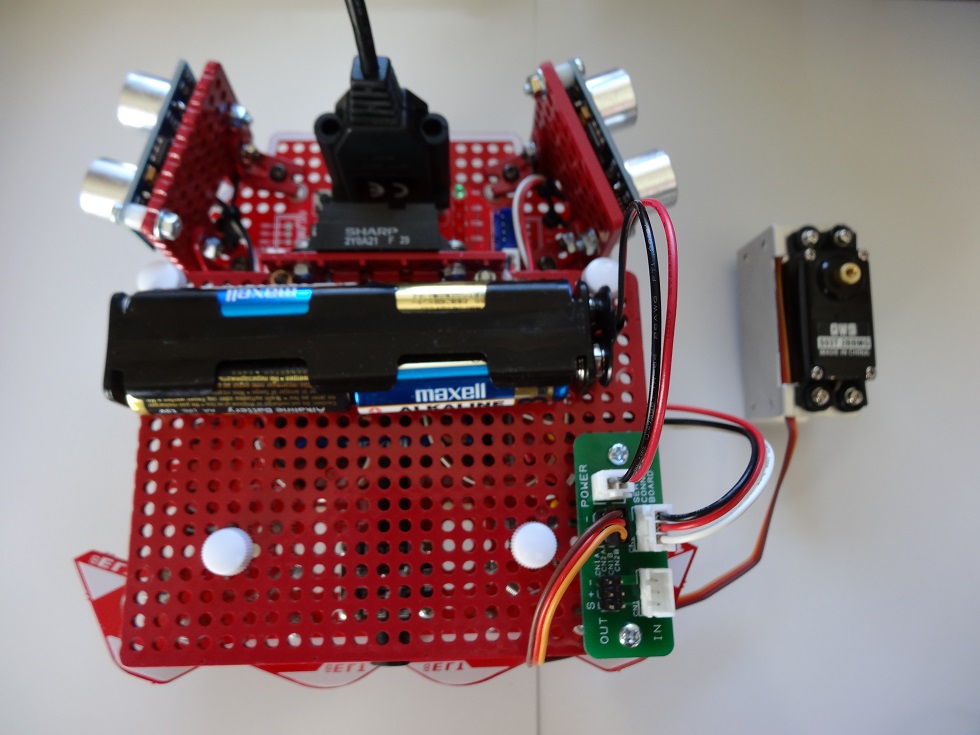
ロボットの後方から見た写真です。
光学距離センサ、超音波距離センサは後方に取付て
前面にボールチャックング機構を付けました。
このロボットを使って、基本コースのプログラムを
制作していきます。
< プログラム制作部へジャンプ >
Robot教室その他 ――
バナースペース
けいはんな
ジュニアロボットクラブ
〒619-0237
京都府相楽郡精華町光台8丁目
TEL : 070-5263-2200
FAX : 0774-98-1100
mail : jun@kinet-tv.ne.jp