�����̉Ȋw�Z�p���q�������ɑ����B�@�W���j���{�@��JRO��
��619-0237 ���s�{���y�S���ؒ�����W����
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
SH�}�C�R�����g�����g���݃\�t�g�̕�RECRUIT
[ �⑫ ] HEW �̐ݒ� �� SH-3 �}�C�R���̃A�[�L�e�N�`��
�@����܂ŕ����Ă����}�C�R���́APIC �}�C�R���i PIC 18F2620 �j�ł����B���ꂩ��́A�S���@�\�̈قȂ�i���@�\�j�}�C�R�� SH-3 ������܂��B
SH-3 �̊J�����́ARENESAS�i���l�T�X�j�W����HEW���g���܂��B�i�A���@�\����̕]���Łj
�����A�F�������Ă������e����́AHEW�̐ݒ�͔��Ɏ葱���������̂Ɠ���ȕ���������܂����A����𗝉�����ׂɂ́ASH-3 �̃A�[�L�e�N�`����m��K�v������܂��B
���������āA�����ł� HEW �̐ݒ���e�� SH-3 �̃A�[�L�e�N�`���Ƃ��r���Ȃ���������Ă����܂��B
�����̕K�v��A���ʂȐݒ�����邱�Ƃ�����܂��B�i �ŏI�I�ɂ͌��ɖ߂��܂��B�j
�i �s���_�́A�u�t�Ɏ��₵�ĉ������B�j

�@HEW�� �A�C�R�� �ł��B
HEW�i�����J�����j�̊e��ݒ�@
HEW �ɂ��r���h�̎d�g��
�i�P�jC ����ɂ��v���O�����J���͈ȉ��̎菇�ɂ����čs���܂��B
�� C ����ɂ��J���菇�̗��� ��
�P�DC ����ɂ�� C �\�[�X�t�@�C���̍쐬�i *.c �j
�@�@�K�v�ɉ����ăC���N���[�h�t�@�C���̍쐬�i *.h �j
�Q�DC �\�[�X�t�@�C�����r���h���܂��B
�@�@�e�J���c�[�����^�[�Q�b�g�Ƀ_�E�����[�h�o����t�@�C���i *.ctx �j���쐬
�@�@�������A�L�q�~�X��J���c�[���ւ̎w���~�X���������ꍇ�͒������čēx�A�r���h����B
�� �Q�l ��
�@�g���q�Ƃ́H
�@�@�e�v���O�����J���c�[�����t�@�C�������ʂ���ׂ̖���
�@�@�@�@C �R���p�C���@�@�@�@�F�@.c
�@�@�@�@�A�Z���u���@�@�@�@�@�F�@.src
�@�@�@�@�����P�[�W�G�f�B�^�@�F�@.obj�@.lib
�@�@�@�@DW22CTX�@�@�@�@�@�F�@.abs
�i�Q�jC �R���p�C���ƃN���X�A�Z���u���̖���
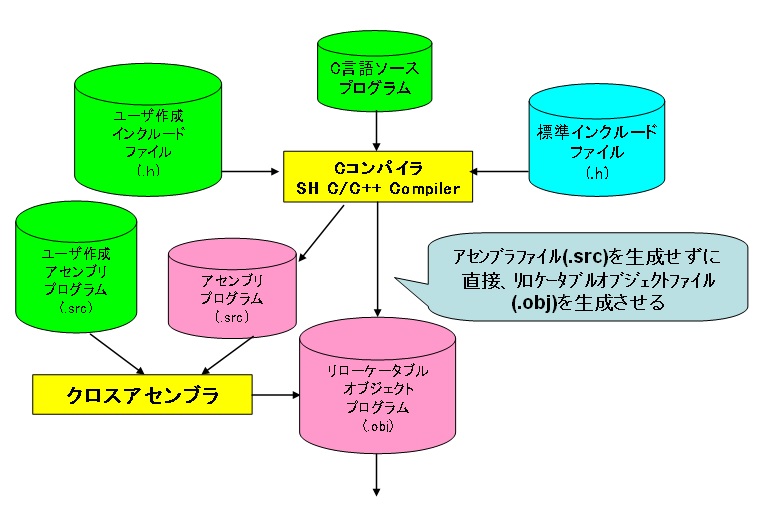
�� C �R���p�C���̏��� ��
�P�D�v���v���Z�b�T�̏���
�@�@�w�b�_�t�@�C���i *.h �j�̓W�J
�Q�DC �\�[�X�t�@�C���̃R���p�C��
�@�@�A�Z���u���i *.src �j�t�@�C���̐���
�� �N���X�A�Z���u���̏��� ��
�P�D�A�Z���u���i *.src �j�t�@�C���̃R���p�C��
�@�@�����P�[�^�u���I�u�W�F�N�g�i *.obj �j�t�@�C���̐���
�� �Q�l ��
�@�����P�[�^�u���I�u�W�F�N�g�i *.obj �j�t�@�C���Ƃ́H
�@�@�P�D�I�u�W�F�N�g�i *.obj �j�t�@�C���́A�@�B��̃t�@�C���ł��B
�@�@�Q�D�����P�[�^�u���t�@�C���Ƃ́A�Ĕz�u�\�ȃt�@�C���ł��B
�@�@�R�D�������ɔz�u����ׂ̃A�h���X�Ԓn���m�肳��Ă��Ȃ���Ԃ̋@�B��̃t�@�C���������܂��B
�i�R�j�����P�[�W�G�f�B�^�i�����J�j�ƃI�u�W�F�N�g�R���o�[�^�̖���
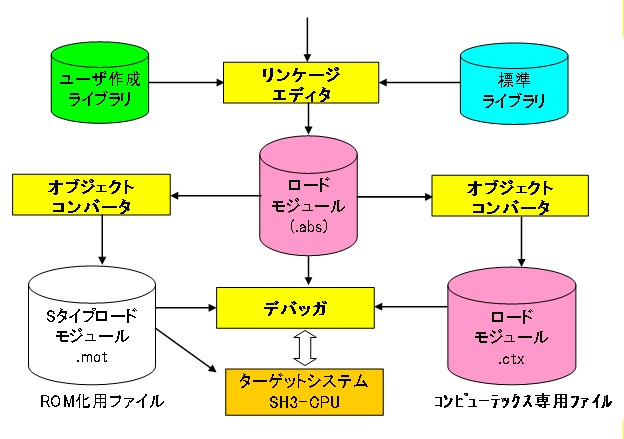
�� �����P�[�W�G�f�B�^�̏��� ��
�P�D���[�h���W���[���i *.abs �j�̐���
�@�@�P�D�e���C�u�����̌���
�@�@�Q�D�e�Z�N�V�����ւ̌���
�@�@�R�D�A�h���X�Ԓn�̐ݒ�
�� �I�u�W�F�N�^�R���o�[�^�̏��� ��
�P�D�f�o�b�K�ɕ\���ł���t�@�C����lj�����B
�@�@�f�o�b�K�i CSIDE �j�Ƀ_�E�����[�h�o����t�@�C���i *.CTX �j���쐬
�� �Q�l ��
�@*.abc �F Absolute �Ƃ́H
�@�@�������ɔz�u�o����悤�ɐ�ΔԒn��ݒ肵���t�@�C���̎��B
����ł́A��������͎��ۂ�HEW�Ƀr���h�p�T���v���v���O������ǂݍ��݂Ȃ���e��ݒ�����Ă����܂��B
�e�ݒ肪�ǂ̗l�ȈӖ������̂���m���Ă��炤�Ӗ��ŁA�G���[�A���[�j���O���o���Ȃ�����e�̐��������čs
���܂��B����́A�P��ݒ肵�Ă��܂��Ζ���ݒ肷��K�v�͂Ȃ��̂ŖY��Ă��܂������ł����A�d�v�Ȃ̂œ��e
�̗��������肢���܂��B�i ��Ő����������Ȃ���ݒ肪�o�����OK�ł���B�j
�V�K�v���W�F�N�g�E���[�N�X�y�[�X�̍쐬
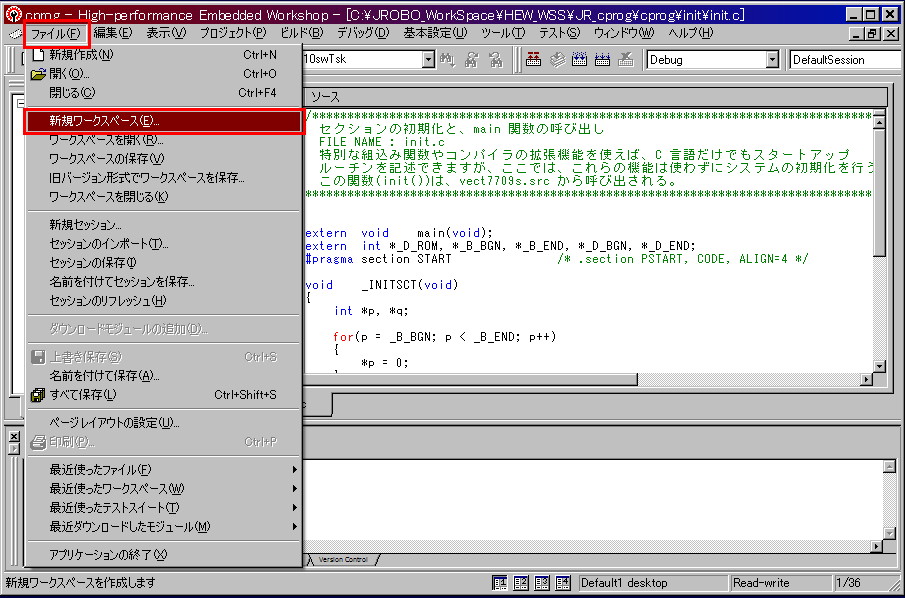
�܂��́A�uHEW.exe�v���_�u���N���b�N���ċN�����܂��B�i �킩��Ȃ����́A�u�t�Ɏ��� �j���ꂩ��A�V�K���[�N�X�y�[�X���쐬���Ă����܂��B
�u�t�@�C���v-�u�V�K���[�N�X�y�[�X�v��I�����܂��B
�i ��ʃR�s�[�摜�́A�N���b�N�Ŋg��ł��܂��B�j
���L��ʁi �_�C�A���O�{�b�N�X��� �j������܂��B
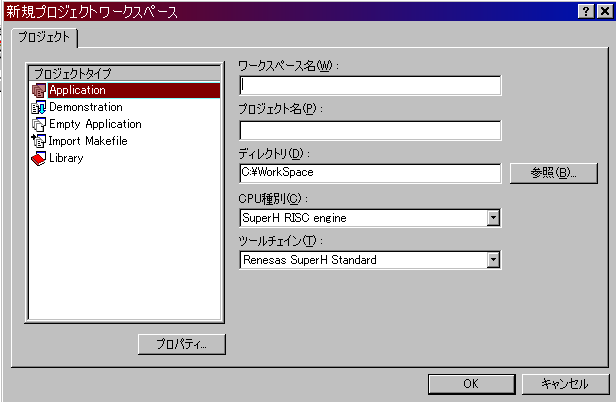
���L�u�V�K�v���W�F�N�g���[�N�X�y�[�X�v��ʂł́A�Ԙg�̑I���ƋL�ڂ�����
�u�v���W�F�N�g�^�C�v�v�́A�uEmpty Application�v��I�����܂��B
�u�Q�Ɓv�{�^�����N���b�N���A�f�B���N�g���̑I������
�@�@�uc:\JROBO_WorkSpace\HEW_WSS\JR_cprog\cprog�v��I�����܂��B
�u���[�N�X�y�[�X���v�ɁAcprog �Ɠ��͂���ƃv���W�F�N�g���������œ��͂���܂��B�i �قȂ閼�O�ł�OK �j
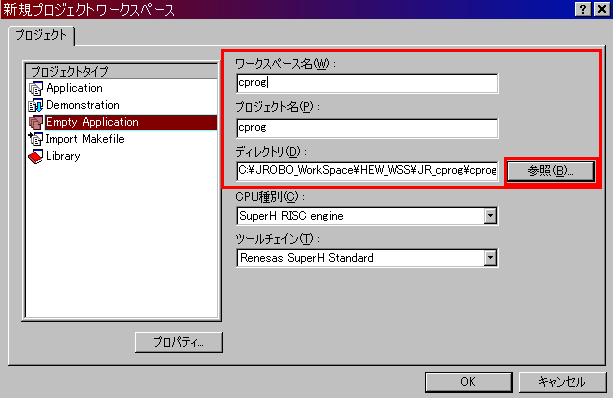
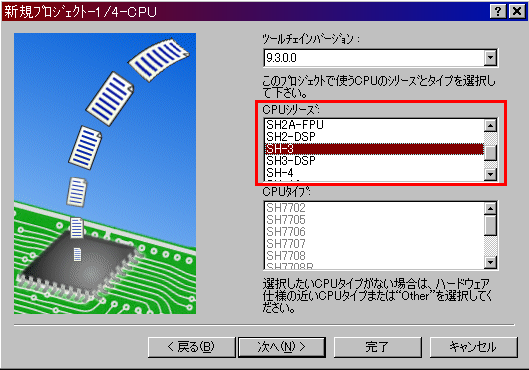
��L��ʂŁuOK�v�{�^���������ƁA���L�̉�ʂ��\������܂��B
�uCPU�V���[�Y�v�ɂ́ASH-3 ��I�����܂��B���P���ځ�
���̉�ʂł́uEndian�I���v�ł́ALittle ��I�����Q���ځ�
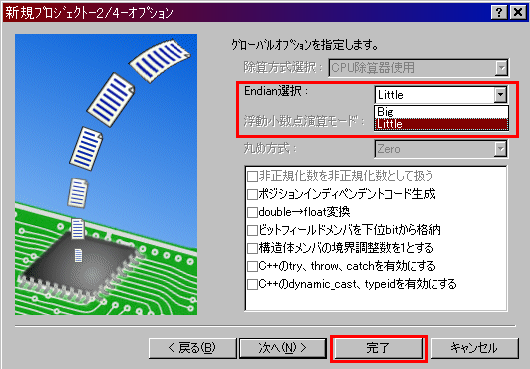
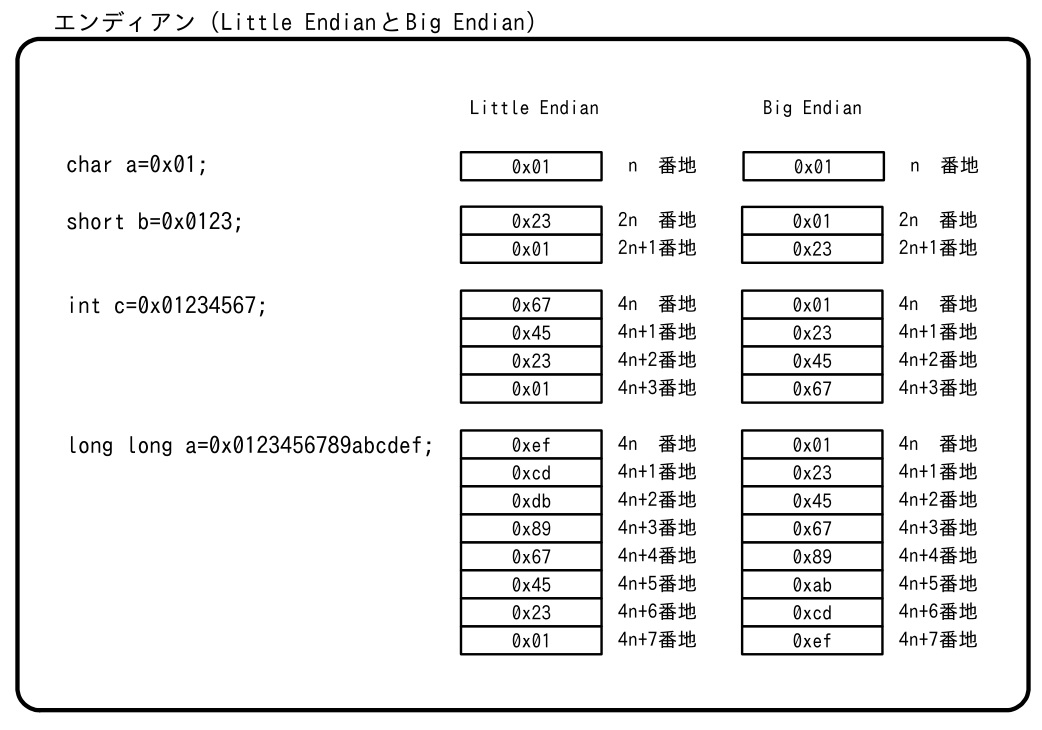
Little Endian �ABig Endian �̈Ⴂ�́A���L�̗l�ɐ��l�̃������[�z�u���قȂ�܂��B
SH�t�@�~���[�́A�G���f�B�A�������g���A�r�b�O�̂ǂ���ɂ��g�p�\�ł��B�O����������ڑ��\�ȊO���g��
���[�h�̏ꍇ�̓G���A���ɃG���f�A�����ւ��鎖���o����悤�ɂȂ��Ă��܂��B
�܂��A�f�t�H���g�G���f�B�A���ݒ�̓��g���ł��B�i ���\�́A�S������ł��B�j
�G���f�B�A���̈Ⴂ���ڐA���ɖ���^����Ƃ���A
�@�E �O���ڑ��̎���LSI�ɑ��鑀��
�@�E ���p�̂̃����o�A�N�Z�X
�̂Q�ł��B���p�͓̂���Ԓn�ɑ��āA�قȂ�f�[�^�^�����蓖�Ă��܂�����A���[�h�^���C�g�Ńf�[�^�^
��ύX�����ꍇ�A�G���f�B�A���̈Ⴂ�ɂ���ĈقȂ�l�����[�h�^���C�g����܂��B
�����ŁA�u�����v�{�^���������I�������܂��B
�u�����v�{�^���������ƁA���L�̊m�F��ʂ��\�������̂ō��܂ł̐ݒ肪�ԈႢ�Ȃ������m�F�o���܂��B
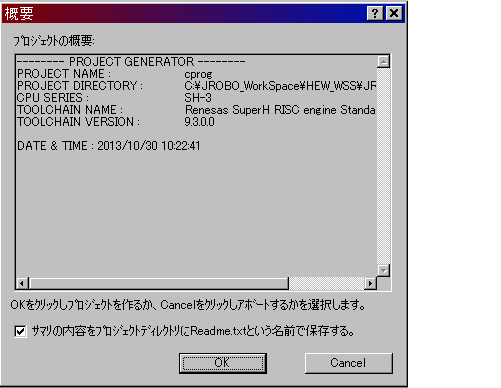
�V�K�t�@�C���̍쐬�ƃv���W�F�N�g�ւ̒ʒm
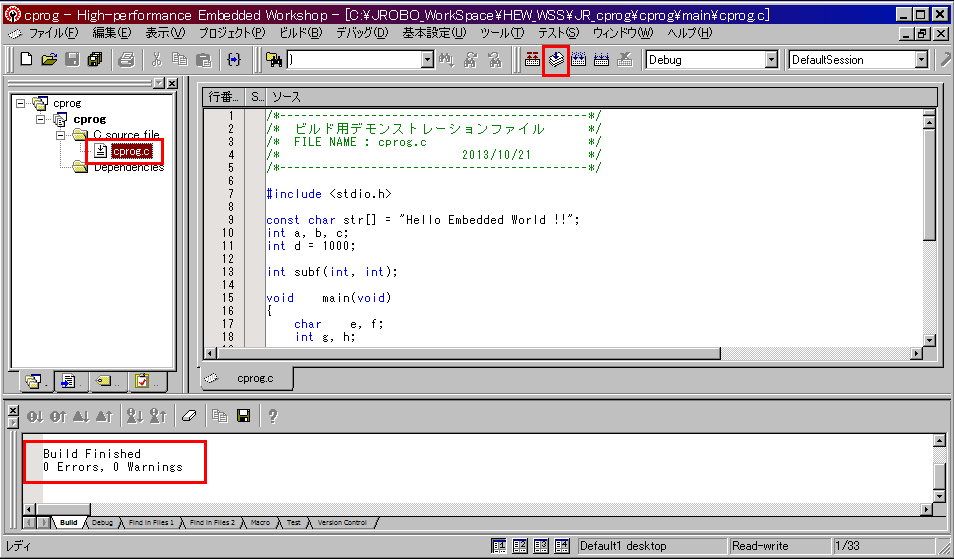
��L�ō쐬�����ucprog.hws�v���_�u���N���b�N���āAHEW���N�����܂��B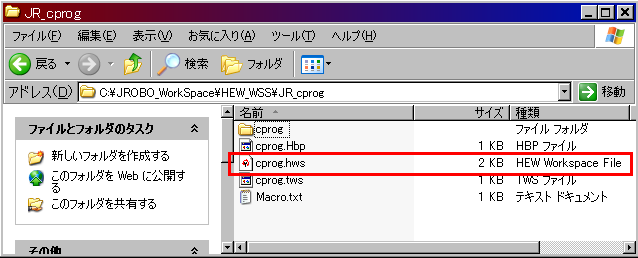
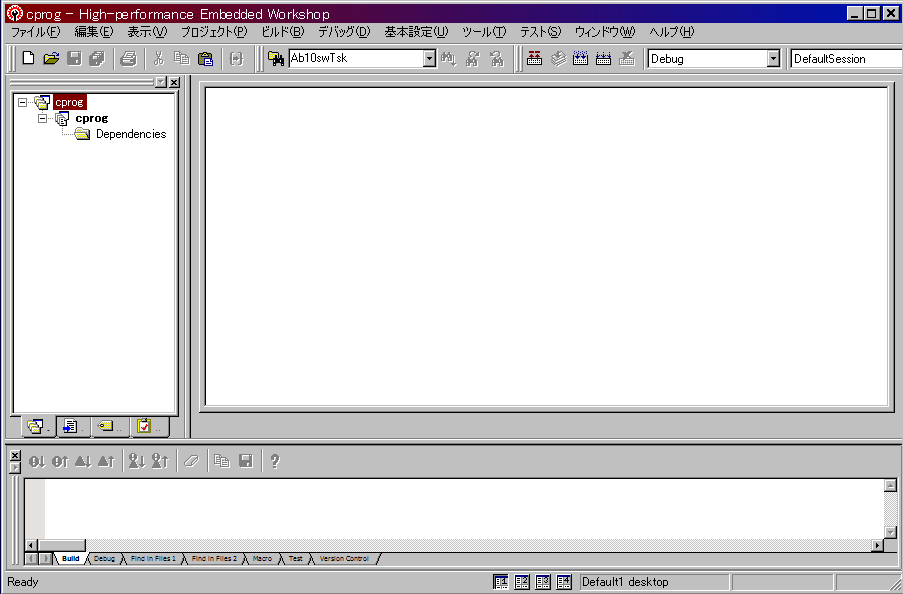
�V�����v���W�F�N�g�̍쐬�i�����グ���j�ŗ����グ����ʂł��B
�v���W�F�N�g�ucprog�v�������ŕ\������J�����g�v���W�F�N�g�ł��鎖���m�F����܂��B
�V�����v���W�F�N�g�Ɂu�t�@�C���̒lj��v�����܂��B
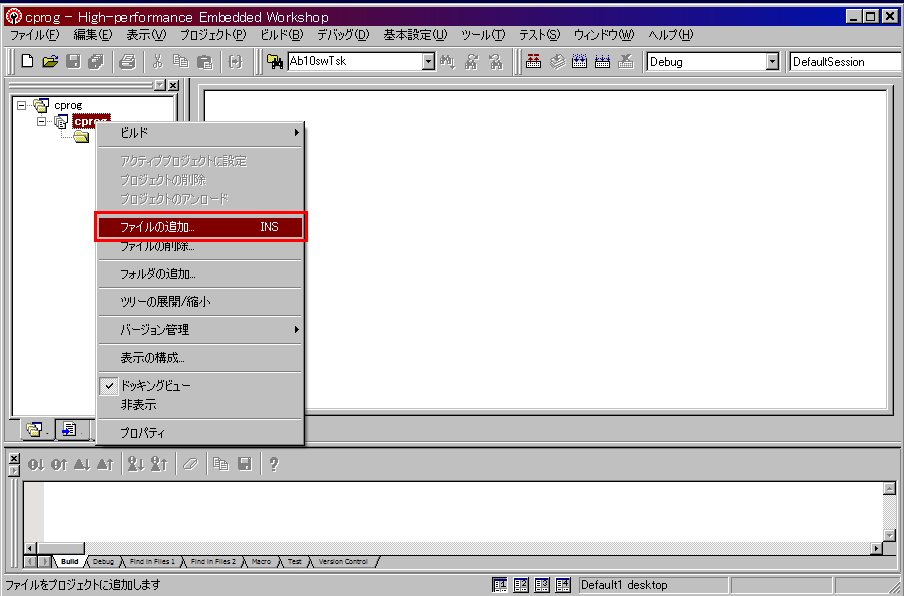
���炩���ߕʂ̃G�f�B�^���ō쐬�����ucprog.c�v���t�@�C���I�����܂��B
�ucprog.c�v�\�[�X�t�@�C���́A���炩���߁umain�v�t�H���_���쐬�����̒��ɕۑ����Ă����܂��B
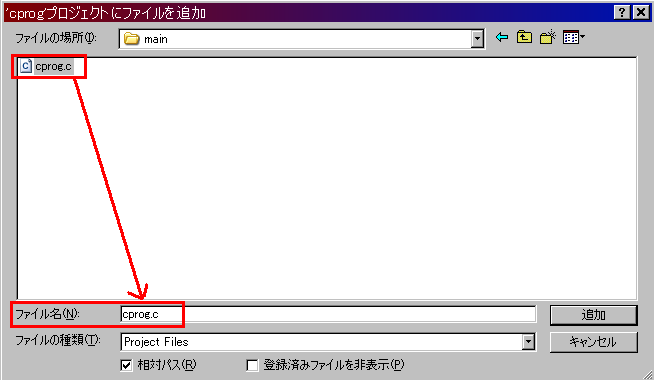
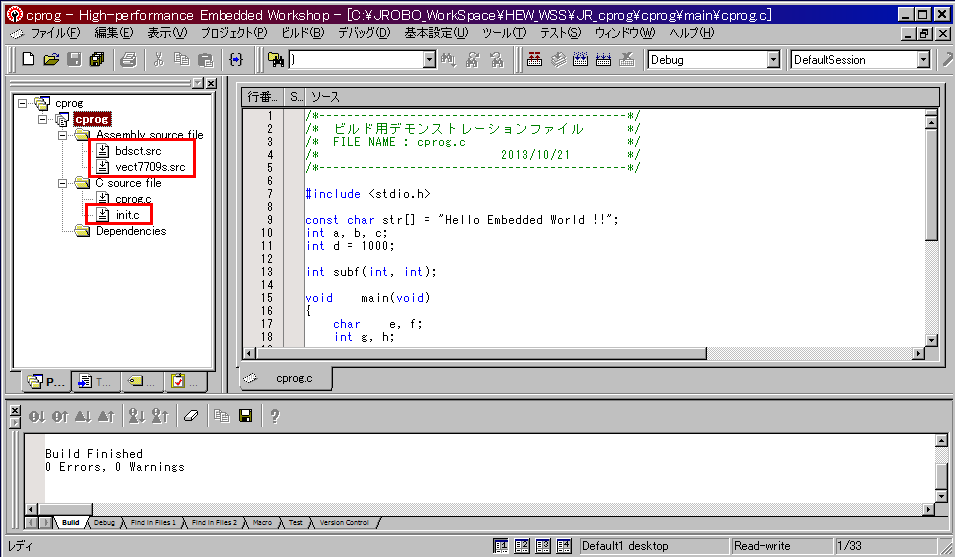
cprog ���[�N�X�[�X�^cprog �v���W�F�N�g���� C �\�[�X�Ɂucprog.c�v���g�ݍ��܂�܂����B
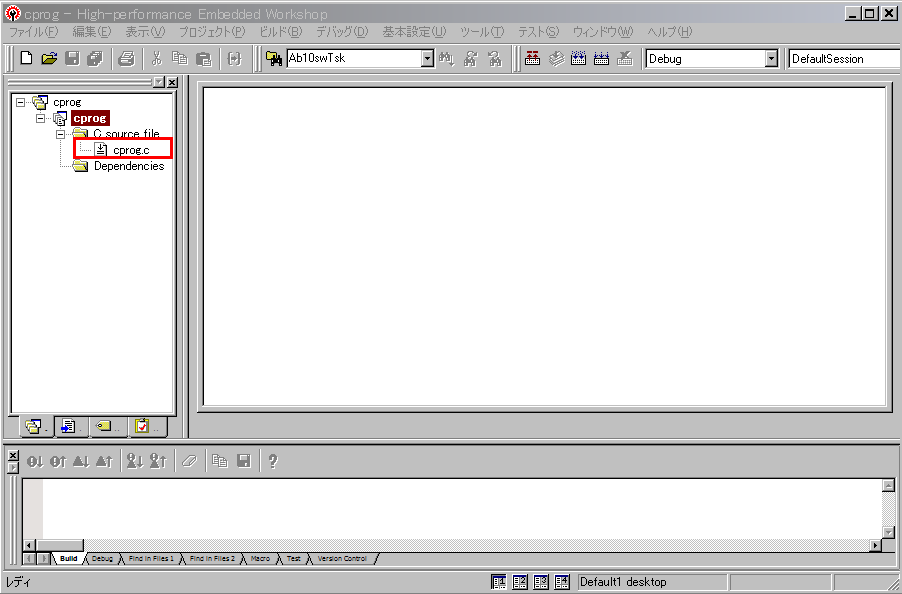
�ucprog.c�v���_�u���N���b�N����ƁA���̃��[�N�A���A�Ƀ\�[�X���e���\������܂��B
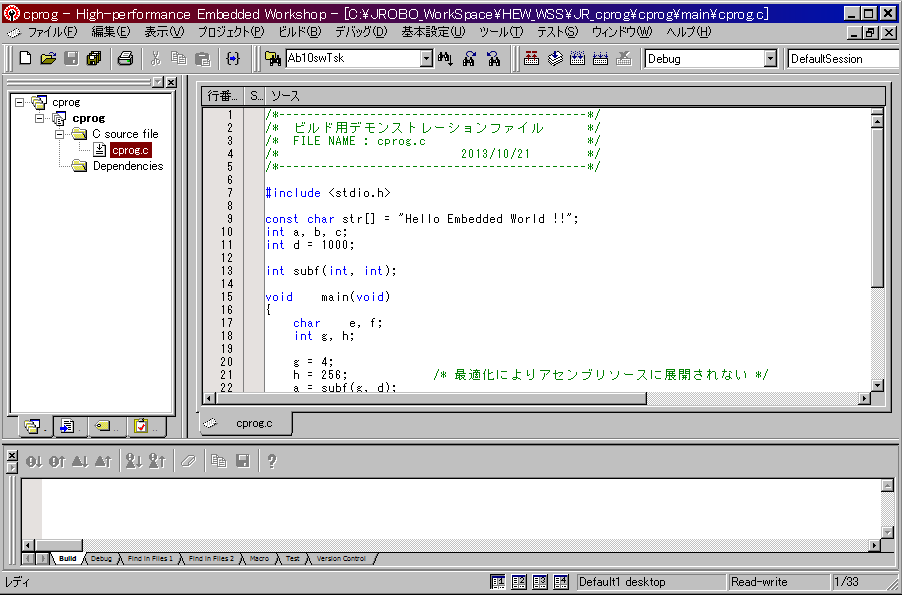
�ucprog.c�v�\�[�X�t�@�C�����e�ł��B
| /*---------------------------------------------------------------------------------------------------------------*/ /* �r���h�p�f�����X�g���[�V�����t�@�C�� �@�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@*/ /* FILE NAME : cprog.c �@�@�@�@ �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@*/ /* �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@�@�@�@�@�@�@�@�@�@�@�@ �@�@�@�@ JROBO/2013/10/ �@ */ /*---------------------------------------------------------------------------------------------------------------*/ #include <stdio.h> const char str[] = "Hello Embedded World !!"; int a, b, c; int d = 1000; int subf(int, int); void main(void) { �@�@char e, f; �@�@int g, h; �@�@g = 4; �@�@h = 256; �@�@�@�@�@�@�@�@/* �œK���ɂ��A�Z���u���\�[�X�ɓW�J����Ȃ� */ �@�@a = subf(g, d); �@�@b = a % 9; �@�@d = d / b; �@�@e = str[h&9*5]; �@�@�@�@/* �œK���ɂ��A�Z���u���\�[�X�ɓW�J����Ȃ� */ �@�@f = str[0]; �@�@�@�@�@�@�@/* �œK���ɂ��A�Z���u���\�[�X�ɓW�J����Ȃ� */ �@�@while (1);�@�@ �@�@�@�@�@/* �g���V�X�e���ł́Amain �����烊�^�[�����鎖�͂Ȃ� */ } int subf(int x, int w) { �@�@return x*w / (x+w); } //------------------------------------------------------------------------------------------------------------------ |
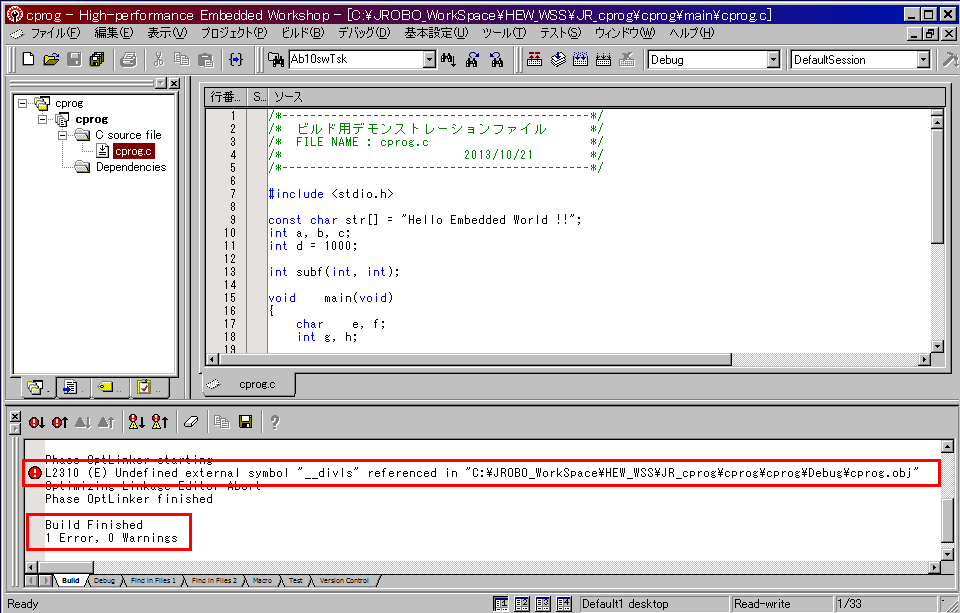
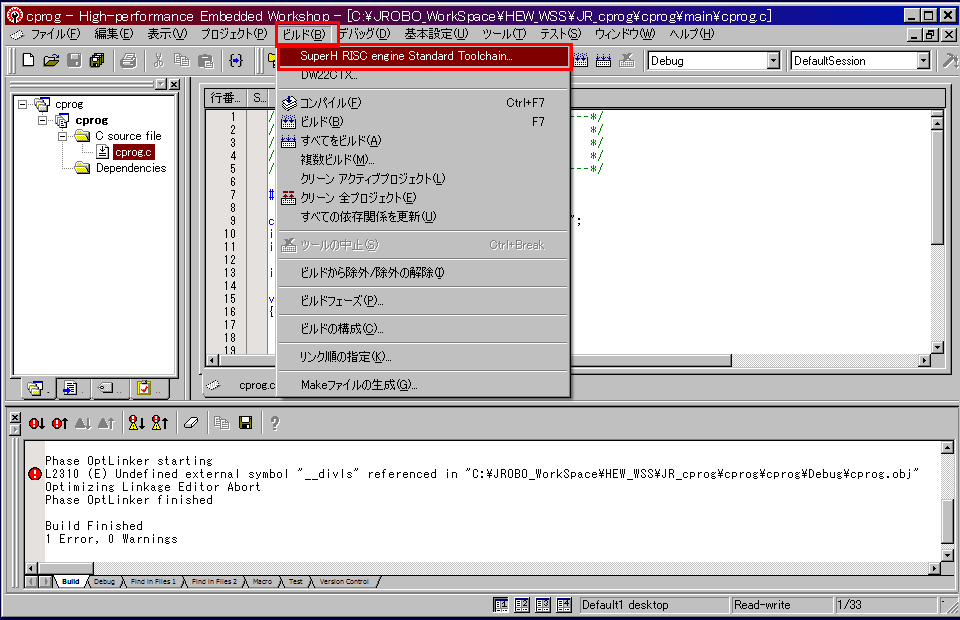
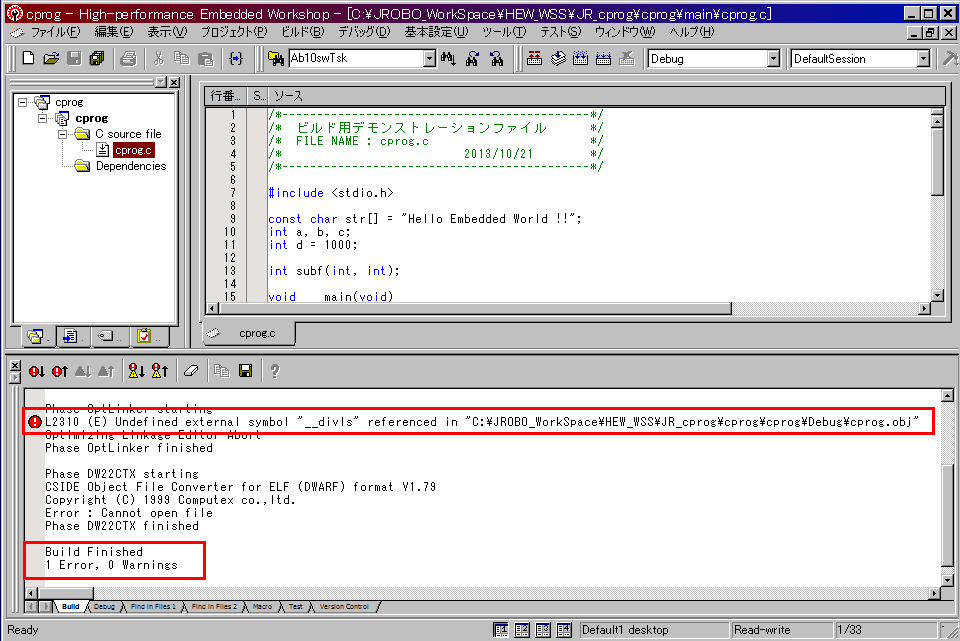
�r���h�i �R���p�C���{�����N �j���s���B
���̏�ԂŁA�r���h����Ƃǂ��Ȃ�ł��傤���B
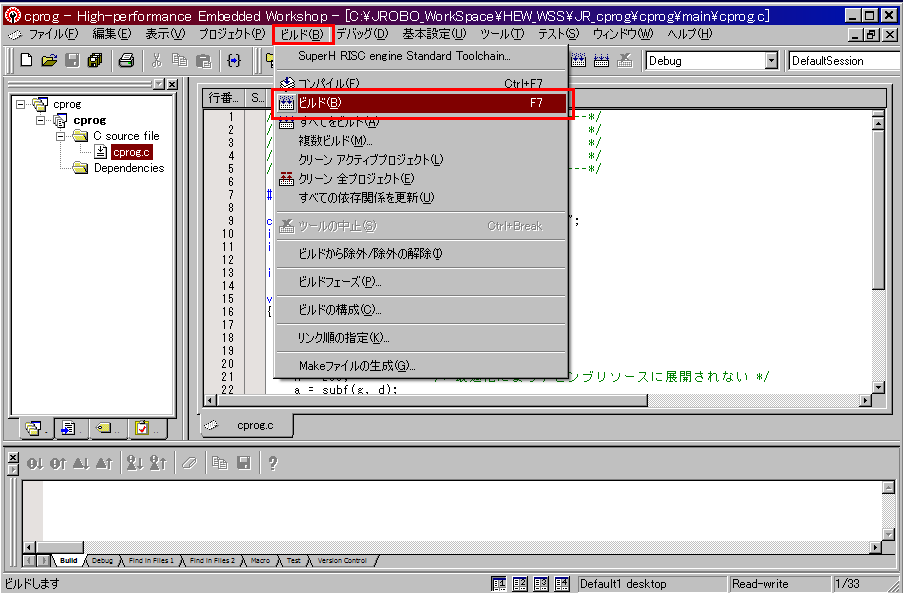
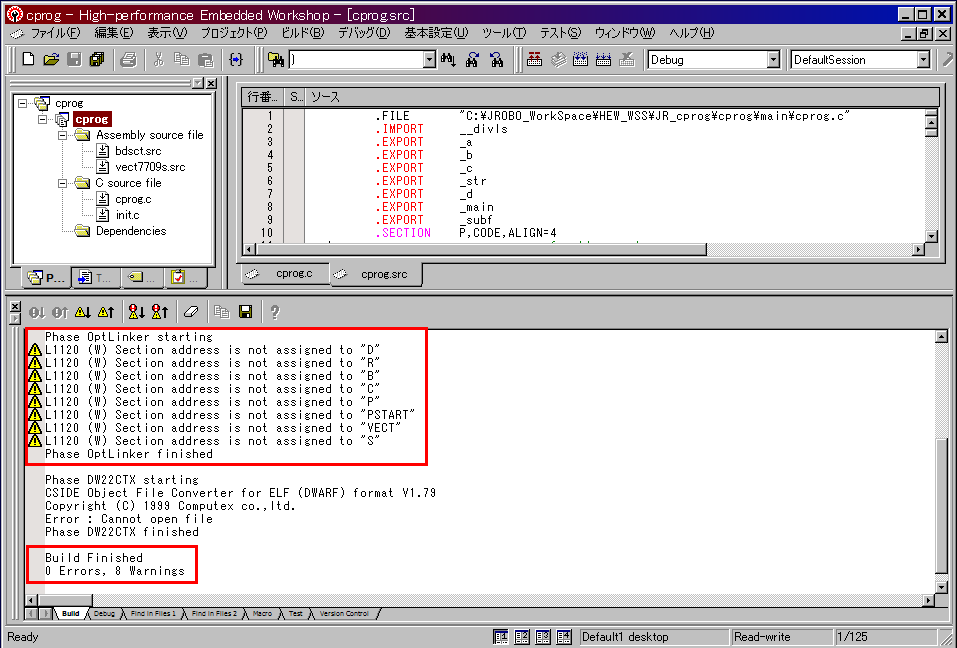
HEW��ʉ����ɂ���o�̓E�C���h�E�ɃG���[�\�����o�܂����B
�G���[�̓��e�́A��̐Ԋۂŕ\������Ă��܂��B
�����́A���C�u�����[���̐ݒ肪�s�\���Ȃ̂ŁA�G���[�����o����r���h���I�����Ă��܂��܂����B
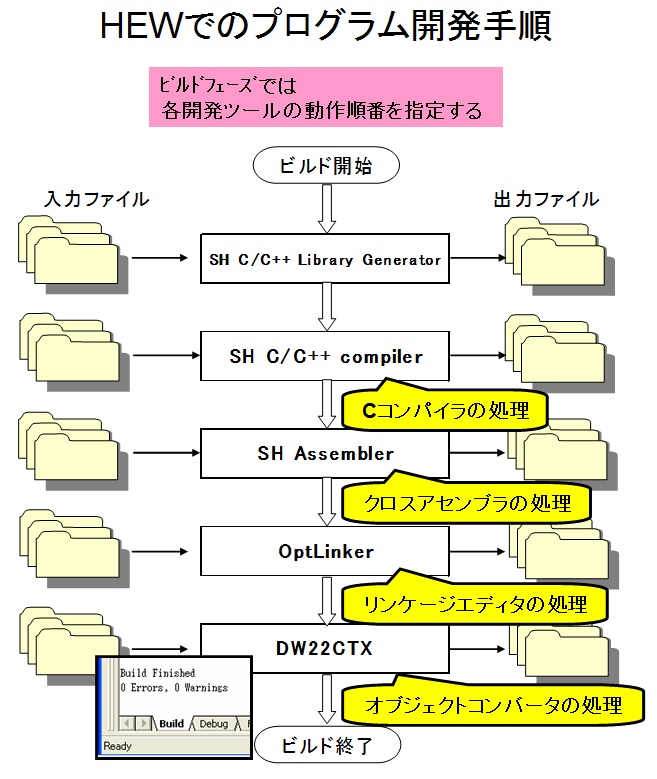
�r���h�E�t�F�[�Y
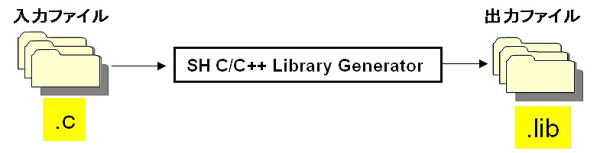
�@HEW�ŗp������ϊ��c�[���́A��{�I�ɂ̓��C�u�����[�W�F�l���[�^�[�AC �R���p�C���A�A�Z���u���A�����P�[�W�G�f�B�^�̂S�ɂȂ�܂����A���N���u�ł͍X�Ƀf�o�b�K�[�Ƃ��ăR���s���[�e�b�N�X�Ђ�CSIDE�𗘗p
���܂��̂ŁA����CSIDE�̓ǂݍ��߂�`���i .ctx )�ɕϊ�����K�v������܂��B���������Čv�T�̃c�[�����g
���܂��B
�r���h�ł͊e�c�[�������삷��i�K���t�F�[�Y�ƌ����܂��B���L�Ƀr���h���s�������܂��B
��L�̐ݒ���s���܂��B
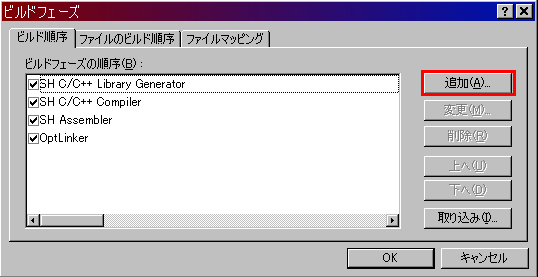
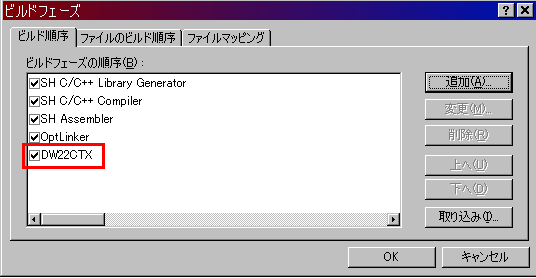
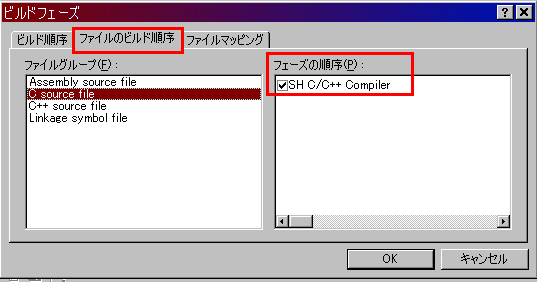
�u�r���h�v-�u�r���h�t�F�[�Y�v��I������Ɖ��L��ʂ��\������܂��B
�f�t�H���g�ł́A���L�̗l�ɂS�̃t�F�[�Y�����łɗL����Ԃɂ���A�r���h�t�F�[�Y�̏��Ԃ��ݒ肳��Ă���
���B�������u .ctx �v�̌`���֕ϊ�����t�F�[�Y���o�^����Ă��܂���B
�lj��{�^�����N���b�N���Ēlj��o�^���܂��B
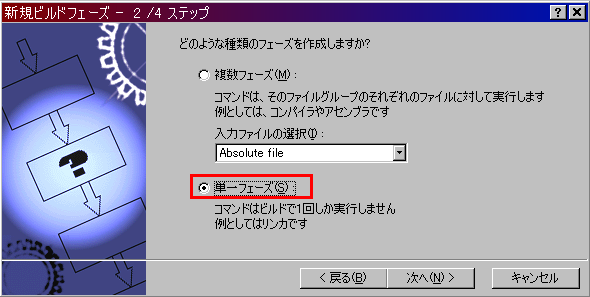
�V�K�J�X�^���t�F�[�Y�̍쐬��I�����A���ւ��N���b�N���܂��B

.ctx �`���ւ̃t�@�C���ϊ��́A�r���h���閈�ɂP����s���鎖�ɂȂ�̂ŁA�P��t�F�[�Y��I�����A���ւ��N��
�b�N���܂��B
3/4�X�e�b�v�ł́A���̃t�F�[�Y�����s����ۂ̃R�}���h���w�肵�܂��B
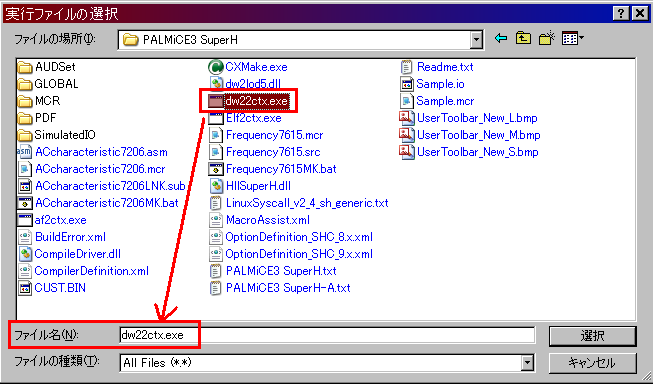
�R�}���h�������A�r���Ő�ĕ\������Ă��܂��A���L���e���Q�ƂőI�����ĉ������B
C:\Program Files\CSIDE\Etc\PALMiCE3 SuperH\dw22ctx.exe
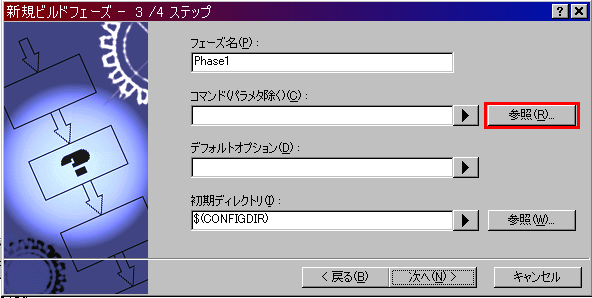
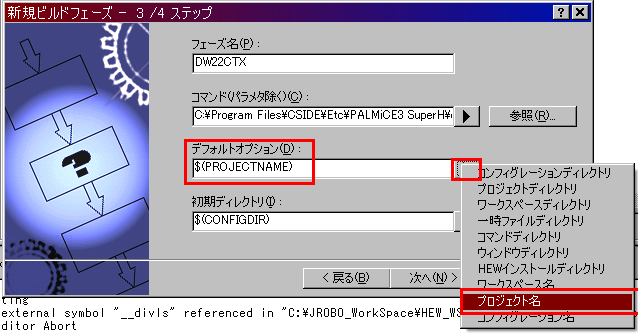
�u�t�F�[�Y���v�ɂ́ADW22CTX �Ɠ��͂��܂��B

�u�f�t�H���g�I�v�V�����v�ɂ́A�E�̃{�^���������āA�v���W�F�N�g����I�����܂��B
4/4�t�F�[�Y�ł́A���������������N���b�N���A�t�F�[�Y�̒lj����I�����܂��B
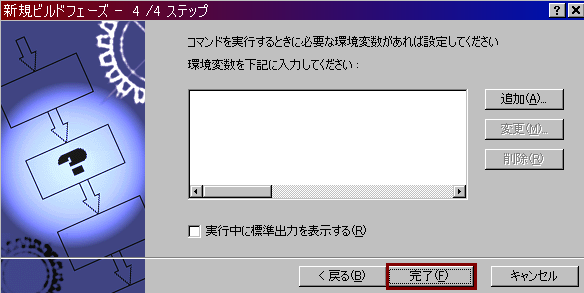
�ȏ�̐ݒ�̌��ʁA�ȉ��̉�ʂŊm�F���鎖���ł��܂��B
���̕ϊ��t�F�[�Y�́A�����J���o�͂��� .abs �`���i�A�u�\�����[�g�`���FELF)�̃t�@�C���� .ctx �`���̃t�@�C
���֕ϊ����܂��̂ŁA�r���h�t�F�[�Y�̏����� Optlinker �̎��ɂȂ�܂��B
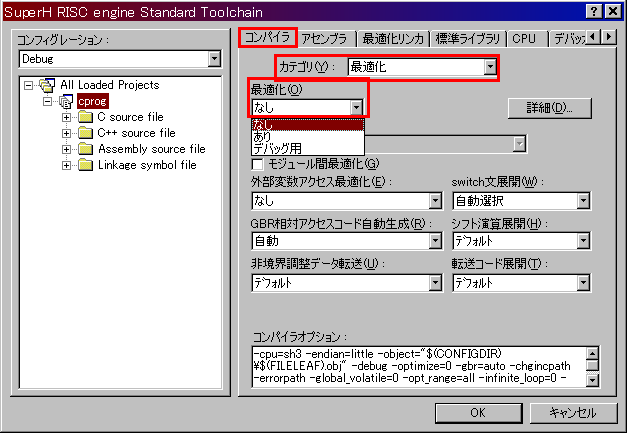
�I�v�V�����ݒ�
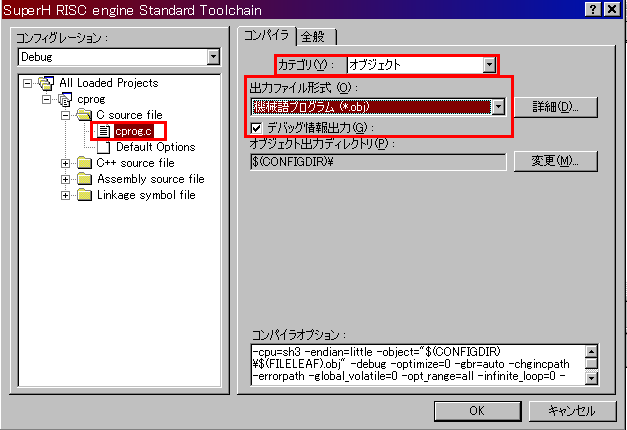
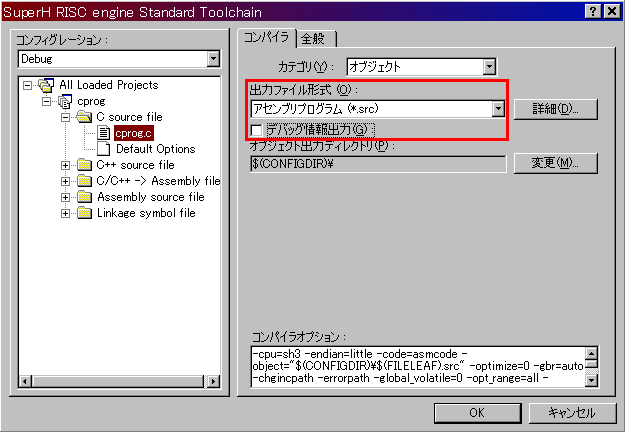
�@C �R���p�C���̏o�̓t�@�C����ݒ肵�܂��B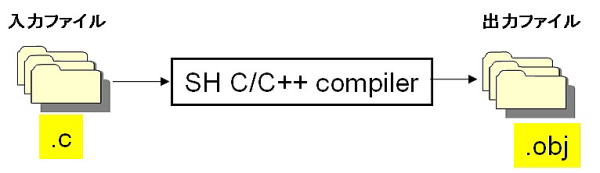
�u�r���h�v���j���[����A�uSupreH RISC engine Standard Toolchain�E�E�E�v��I�т܂��B
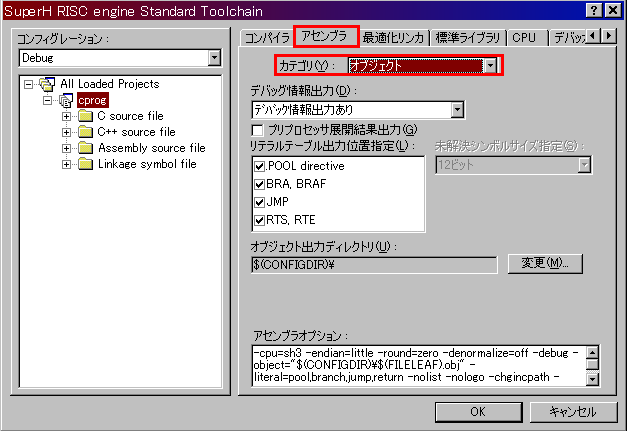
�u�R���p�C���v�^�u��ŁA�J�e�S�����u�I�u�W�F�N�g�v�ɂ���ƁA�o�̓t�@�C���`�����u�@�B��v���O����
�i *.obj �j�v�ɐݒ肳��Ă��܂��B
�܂��A�u�f�o�b�O���o�́v���`�F�b�N����Ă���̂ŁA�f�o�b�O�������킹�ďo�͂���܂��B
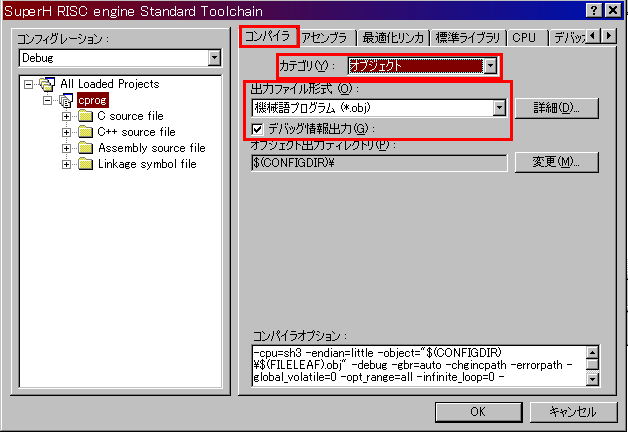
�u�J�e�S���v���u�œK���v�ɕύX���A�œK���iO)���u�Ȃ��v�ɐݒ肵�܂��B
�@�A�Z���u���o�͂���I�u�W�F�N�g�t�@�C���ւ̃I�v�V�����ł��B
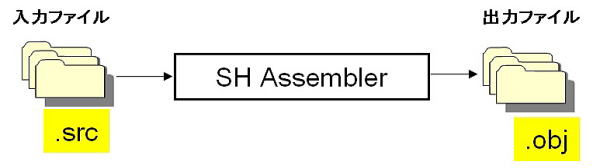
�f�o�b�O���t���ŃI�u�W�F�N�g�t�@�C��������悤�ɐݒ肵�Ă���܂��B
�A�Z���u���̓f�t�H���g�Ńv���W�F�N�g�t�@�C�����̊g���q���u *.src �v�ł���t�@�C������̓t�@�C���Ƃ���
�����AC �R���p�C�����o�͂���A�Z���u���\�[�X�t�@�C�������̓t�@�C���ƂȂ�܂��B
�@C �R���p�C���́A�f�t�H���g�ŃI�u�W�F�N�g�t�@�C���u *.obj �v������悤�ɂȂ��Ă��܂����A�A�Z���u
���\�[�X�̃C�����C���W�J���܂ޏꍇ�́A��U�A�Z���u���\�[�X�t�@�C���ɕϊ�������A�A�Z���u���ɂ��I�u
�W�F�N�g�t�@�C���u *.obj �v��������悤�ɃI�v�V�����ݒ肵�܂��B
�@�����J�̏o�̓I�v�V�����ݒ�ł��B
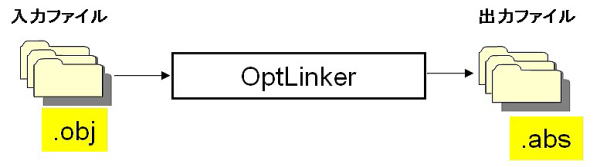
�o�͌`�����A�u�\�����[�g�i ELF : execute linking format/DWARF �j�u �g���q�F*.abs �v�ɐݒ肵�܂��B
�f�o�b�O���́A�o�̓t�@�C�����ɐ�������悤�ɐݒ肳��Ă��܂��B
�t�@�C���g���q��ύX���邩�ǂ������Ă��܂��̂ŁuOK�v���N���b�N���܂��B
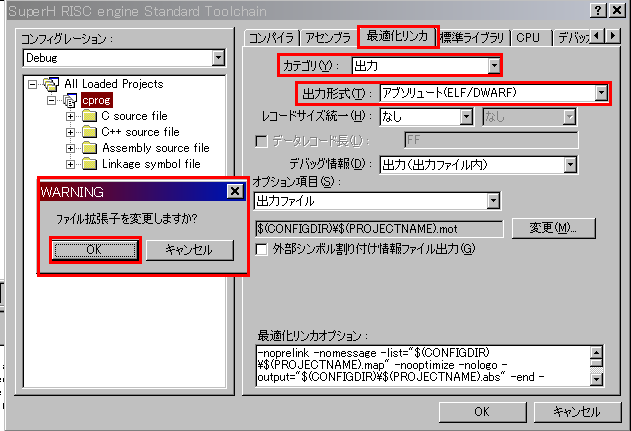
�uOK�v�{�^�����N���b�N����HEW�ɖ߂�A�r���h���܂��B
�r���h�̓t�@�C���̃r���h�ł͂Ȃ��u�r���h�v�{�^�����N���b�N���܂��B
�c�O�Ȃ��牺��ʂ̂悤�ɁA�P Errors�A�O warning ���\������܂��B
����́AHEW ���v���W�F�N�g���ɐ��������W�����C�u�����������N����K�v�����邩��ł��B
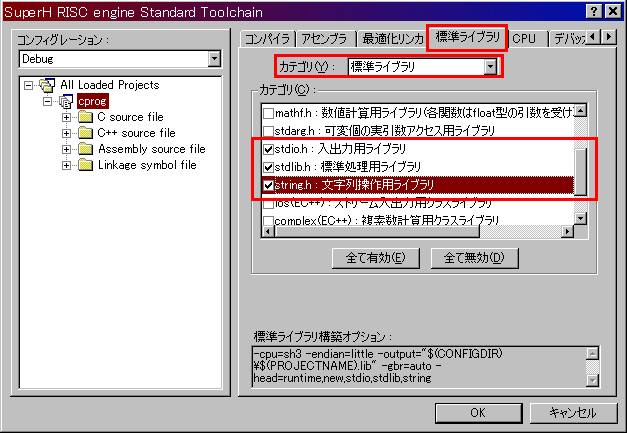
�u�r���h�v���j���[����A�u SuperH RISC engine Standard Toolchain�E�E�v��I�т܂��B
����ʂ̃_�C�A���O�{�b�N�X���J���܂��̂ŁA�u�W�����C�u�����v�^�O���N���b�N���u�J�e�S���v���u���[�h�v
�ɂ��āA���̃��[�h���u�W�����C�u�����t�@�C���쐬�i�I�v�V�����ύX���j�ɐݒ肵�܂��B
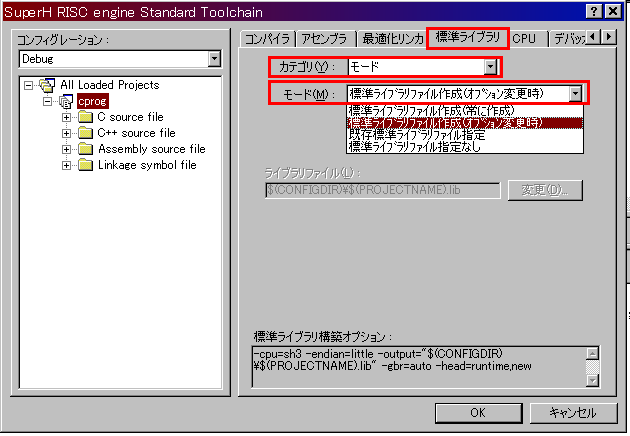
���ɓ��^�O�ɂ����āA�u�J�e�S���v���u�W�����C�u�����v�ɂ��ĉ���ʂɎ����R�����Ƀ`�F�b�N�����uOK�v
�{�^�����N���b�N�����܂��B
�w�b�_�[�t�@�C���ɑΉ�����W�������g����悤�ɂȂ�܂����A�ǂ̃w�b�_�[�t�@�C�����`�F�b�N���邩�́A
�ǂ̊��𗘗p���邩�ɂ���Ă��܂�܂��B
���R�A�g���@��ɂ̓L�[�{�[�h��f�B�X�v���C���ڑ�����Ă��܂���̂ŁA���̂܂܂ł͕W�����o�͊���
���p�ł��܂���B
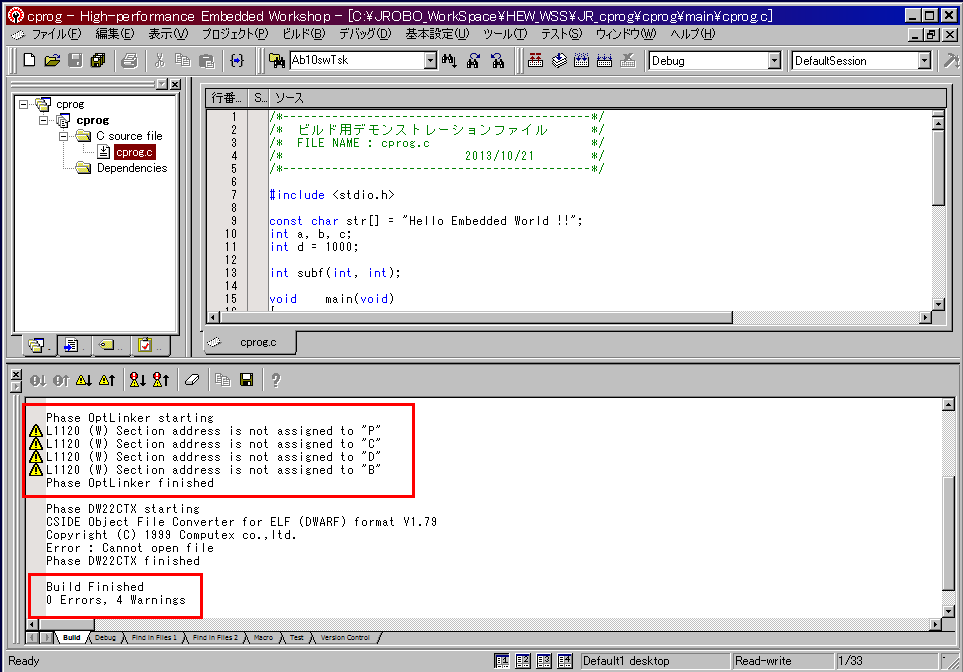
�ł́A���߂ăr���h���܂��B
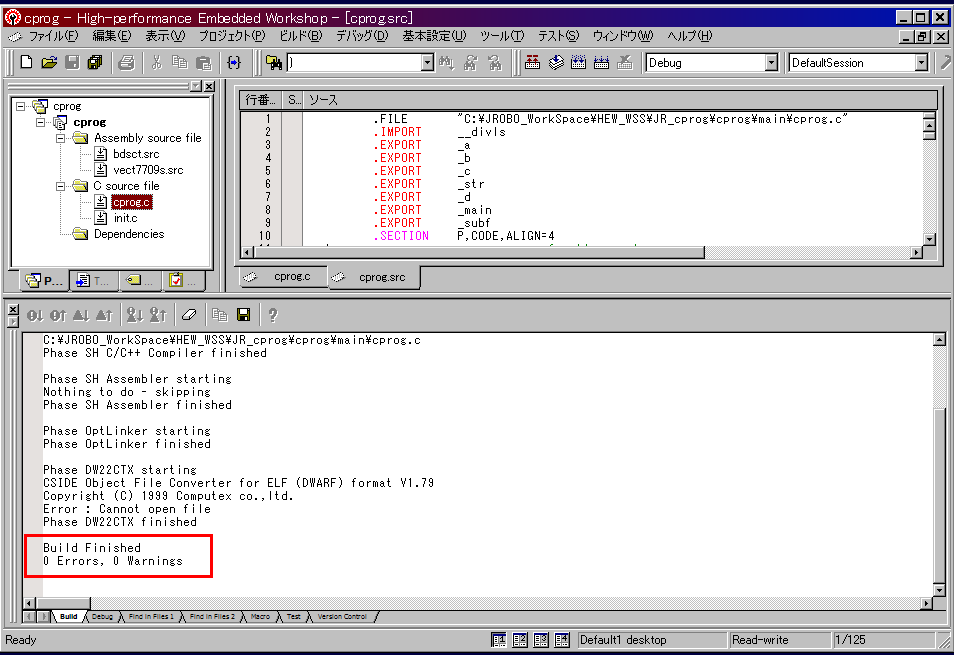
�r���h���ʂ�����ʂł��B
�G���[�͖����Ȃ�܂������A�Z�N�V�����ɃA�h���X�̊��蓖�Ă������ׂS�̃��[�j���O���łĂ��܂��B
�Z�N�V�����ɑ���A�h���X�̊��蓖�Ă��K�v�ł��B
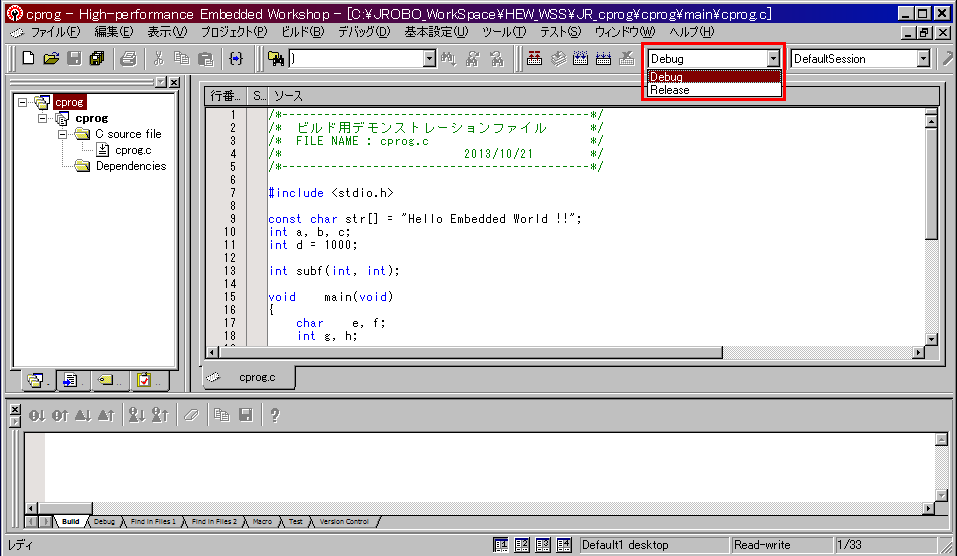
�r���h�R���t�B�O���[�V����
�@HEW�ł́A�r���h�̂��ׂẴI�v�V�������R���t�B�O���[�V�����ɖ��O��t���āA�ۑ��ł��܂��B
����āA�R���t�B�O���[�V������I�����邱�Ƃɂ��A�e�t�F�[�Y�̃I�v�V������ύX�ł��܂��B
�f�t�H���g�ł́A����ʂɎ����悤�ɁuDebug�v�ƁuRelease�v�̂Q�̃R���t�B�O���[�V�������p�ӂ���Ă�
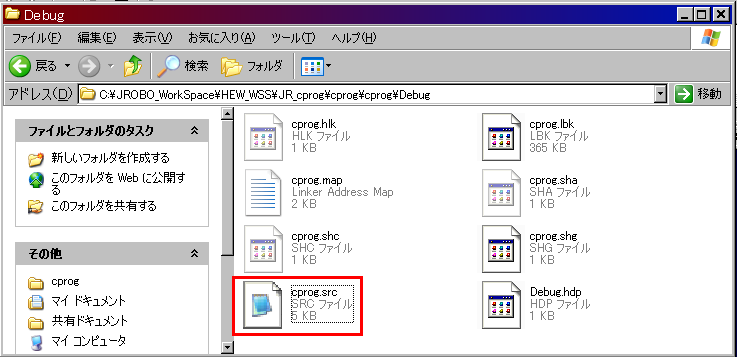
�܂��B����ʂ̓f�t�H���g�ŗp�ӂ���Ă��� cprog �v���W�F�N�g�̃t�H���_�������܂��B
�e�t�F�[�Y�Ő������ꂽ�o�̓t�@�C���� �J�����g �� �R���t�B�O���[�V���� �Ɠ������O�̃t�H���_�Ɋi�[����܂�.
�uDebug�v�t�H���_���̃t�@�C���ł��B

�Z�N�V����
�@C �R���p�C���́A�v���O�������Z�N�V�����ŕ����Ǘ����܂��B���̃R���p�C���A�A�Z���u���ł̓Z�O�����g���ĂԂ��̂�����܂����ASH C�^C++�R���p�C���ł́A�Z�N�V�����ƌĂт܂��B
�@�Z�N�V�����́A�v���O������f�[�^�̏W�܂�ŁA�قȂ�\�[�X�v���O�����i���W���[���j�ł̓����̃Z�N�V��
���́A�����N���ɂP�ɏW�߂��A������A�h���X�ɔz�u���鎖���ł��܂��B
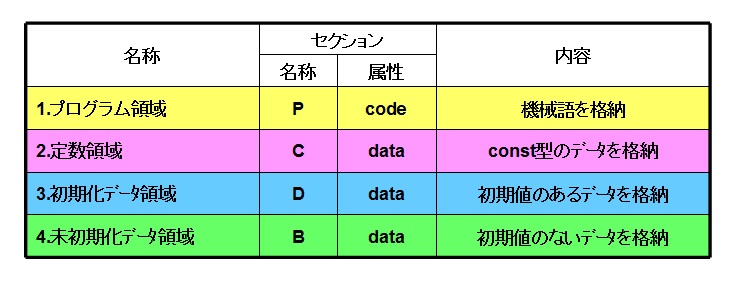
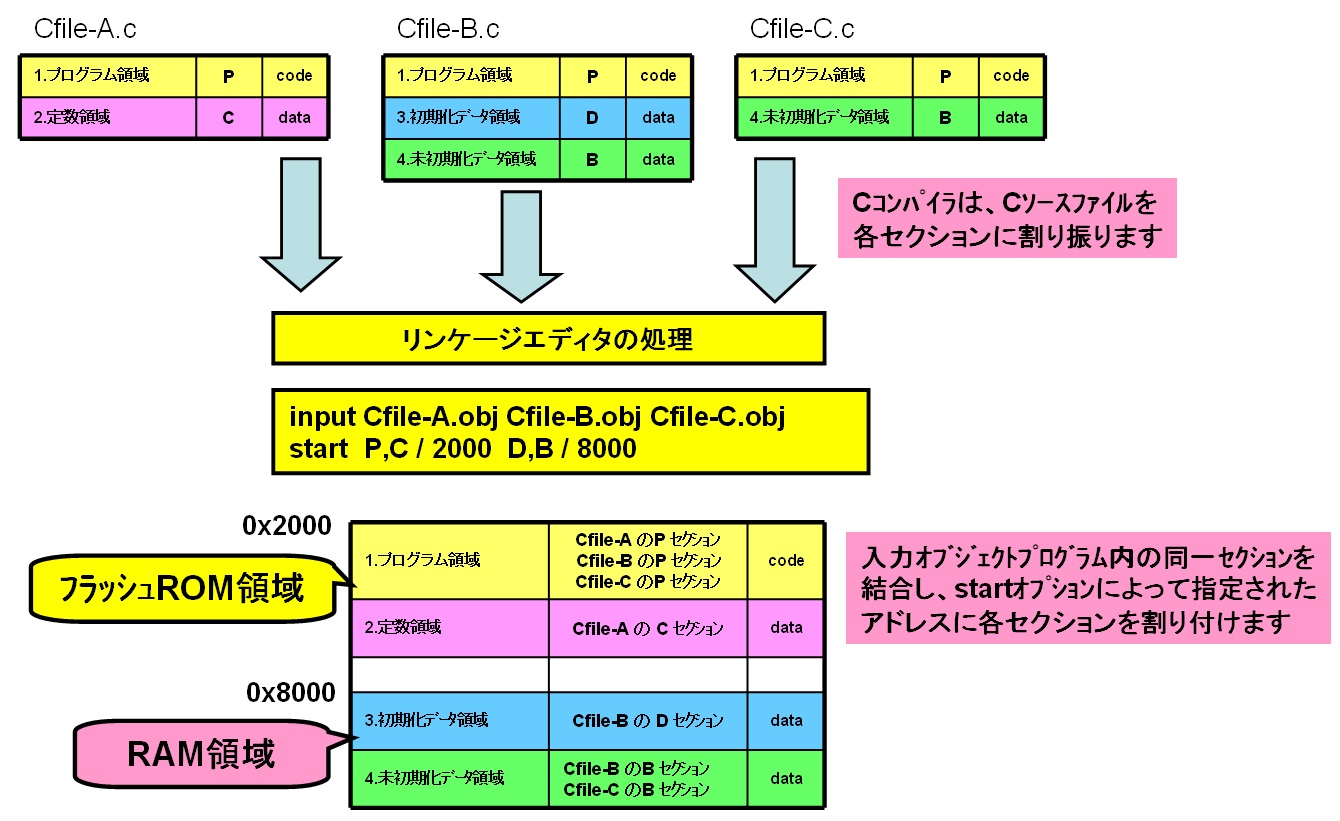
�@�Z�N�V���� P , C , D �� ROM �AB �� RAM �ɔz�u���܂��B
�@�������Z�N�V���� D �̏������t���ϐ����v���O�����ŕύX�ł���悤�ɂ��邽�� RAM ��ɏ��������[�`����
�@�R�s�[����K�v������܂��B
�@�܂��A�Z�N�V���� B �̖��������ϐ��͏��������[�`���ŏ����l���[���ɂ���K�v������܂��B
�f�t�H���g�Z�N�V�����̊m�F�i �m�F��́A�ݒ�����ɖ߂��K�v������܂��B�j
�@�m�F�ׁ̈AC �\�[�X�t�@�C�����A�Z���u���\�[�X�t�@�C���ɕϊ����܂��B�����āA�v���O������ϐ����ǂ̃Z�N�V�����֑����邩�m�F���܂��B
�@�u�r���h�v�́A�J�����g�v���W�F�N�g�Ɋ܂܂��t�@�C�����ׂĂɑ��čs���܂����u�t�@�C���̃r���h�v
���s���A�J�����g�v���W�F�N�g�̃t�@�C���P�ʂŃr���h�ł��܂��B
�t�@�C���̃r���h�́A�\�[�X�t�@�C���ɑ��ĂP�̃t�F�[�Y(�c�[���j�����삵�A�r���h���I�����܂��B
���L�́A�t�@�C���O���[�v�ƃt�F�[�Y�����̑Ή��ł��B
�@����ʂ́A�ʃt�@�C���ɑ���I�v�V�����ݒ�ł��B�v���W�F�N�g�t�@�C������ucprog.c�v��I������
�J�e�S�����I�u�W�F�N�g�A�o�̓t�@�C���`�����A�Z���u���v���O�����i*.src�j�A�f�o�b�O�������Ȃ��悤
�Ƀ`�F�b�N���O���܂��B�i����ʂ́A������ʁj
�ύX��̉�ʂł��B
����ʂɎ����悤�ɁA���[�N�X�y�[�X�E�C���h�E���Ńr���h����t�@�C���ucprog.c�v��I�����u�t�@�C���̃R��
�p�C���v�c�[���{�^������ʏ㕔�̐Ԙg�����N���b�N���܂��B
SH�@C/ C++Compiler ���N�����Acprog.c �̃t�@�C���̂݃A�Z���u���\�[�X�t�@�C���ɕϊ����I�����܂��B
�m���G���[�A���[�j���O�ŏI�����܂����B
cprog ���ɂ��� Debug �t�H���_���� cprog.src ���o���オ���Ă��܂��B
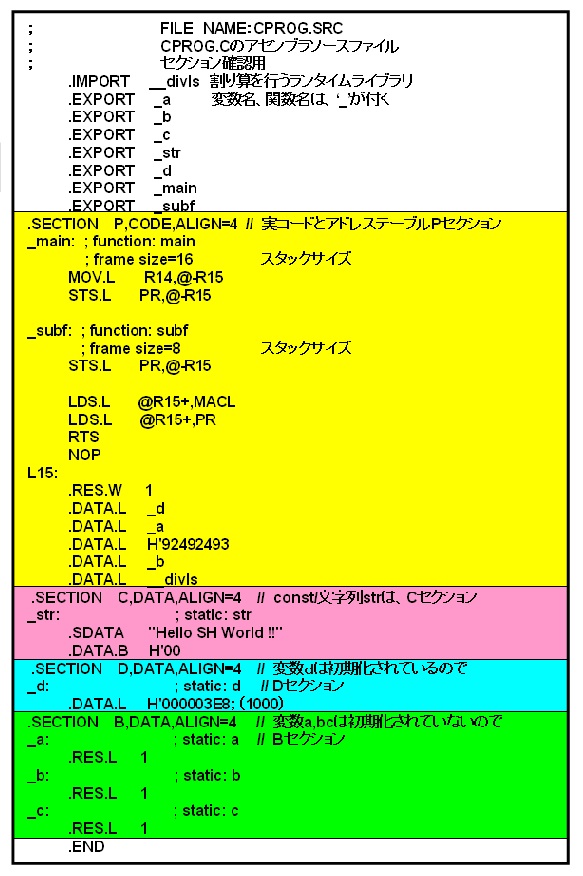
cprog.src �̓��e�ł��B
| ;********************************************************************************* ; FILE NAME : CPROG.SRC ; CPROG.C �̃A�Z���u���\�[�X�t�@�C�� ; �Z�N�V�����m�F�p�i�œK���Ȃ��j �@�@�@�@�@�@.FILE "C:\JROBO_WorkSpace\HEW_WSS\JR_cprog\cprog\main\cprog.c" �@�@�@�@�@�@.IMPORT �@__divls �@�@�@�@�@�@.EXPORT �@_a �@�@�@�@�@�@.EXPORT �@_b �@�@�@�@�@�@.EXPORT �@_c �@�@�@�@�@�@.EXPORT �@_str �@�@�@�@�@�@.EXPORT �@_d �@�@�@�@�@�@.EXPORT �@_main �@�@�@�@�@�@.EXPORT �@_subf �@�@�@�@�@�@.SECTION �@P,CODE,ALIGN=4 �@; �������� P �Z�N�V���� _main: �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; function: main �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; frame size=28 �@�@�@�@�@�@.STACK �@_main=28 �@�@�@�@�@�@STS.L �@�@PR,@-R15 �@�@�@�@�@�@STS.L �@�@MACL,@-R15 �@�@�@�@�@�@STS.L �@�@MACH,@-R15 �@�@�@�@�@�@ADD �@�@�@#-16,R15 �@�@�@�@�@�@MOV �@�@�@#4,R4 �@�@�@�@�@�@; H'00000004 �@�@�@�@�@�@MOV.W �@�@L15,R1 �@�@�@�@�@�@; H'0100 �@�@�@�@�@�@MOV �@�@�@R1,R7 �@�@�@�@�@�@MOV.L �@�@R7,@(12,R15)�@�@�@; h �@�@�@�@�@�@MOV.L �@�@L15+4,R1 �@�@�@�@�@; _d �@�@�@�@�@�@MOV.L �@�@@R1,R2 �@�@�@�@�@�@; d �@�@�@�@�@�@MOV �@�@�@R2,R5 �@�@�@�@�@�@BSR �@�@�@_subf �@�@�@�@�@�@NOP �@�@�@�@�@�@MOV �@�@�@R0,R5 �@�@�@�@�@�@MOV.L �@�@L15+8,R1 �@�@�@�@�@; _a �@�@�@�@�@�@MOV.L �@�@R5,@R1 �@�@�@�@�@�@; a �@�@�@�@�@�@MOV.L �@�@L15+12,R2 �@�@�@�@�@; H'38E38E39 �@�@�@�@�@�@DMULS.L �@R5,R2 �@�@�@�@�@�@STS �@�@�@MACH,R6 �@�@�@�@�@�@SHAR �@�@�@R6 �@�@�@�@�@�@MOV �@�@�@R6,R2 �@�@�@�@�@�@ROTL �@�@�@R2 �@�@�@�@�@�@MOV �@�@�@�@#1,R1 �@�@�@�@�@�@�@; H'00000001 �@�@�@�@�@�@AND �@�@�@�@R1,R2 �@�@�@�@�@�@MOV �@�@�@�@R6,R4 �@�@�@�@�@�@ADD �@�@�@�@R2,R4 �@�@�@�@�@�@MOV �@�@�@�@R4,R2 �@�@�@�@�@�@MOV �@�@�@�@R2,R6 �@�@�@�@�@�@SHLL2 �@�@�@R2 �@�@�@�@�@�@SHLL �@�@�@�@R2 �@�@�@�@�@�@ADD �@�@�@�@R6,R2 �@�@�@�@�@�@MOV �@�@�@�@R5,R6 �@�@�@�@�@�@SUB �@�@�@�@R2,R6 �@�@�@�@�@�@MOV.L �@�@�@L15+16,R1 �@�@�@�@�@; _b �@�@�@�@�@�@MOV.L �@�@�@R6,@R1 �@�@�@�@�@�@�@; b �@�@�@�@�@�@MOV.L �@�@�@L15+4,R1 �@�@�@�@�@�@; _d �@�@�@�@�@�@MOV.L �@�@�@@R1,R2 �@�@�@�@�@�@�@; d �@�@�@�@�@�@MOV �@�@�@�@R2,R1 �@�@�@�@�@�@MOV �@�@�@�@R6,R0 �@�@�@�@�@�@MOV.L �@�@�@L15+20,R3 �@�@�@�@�@; __divls �@�@�@�@�@�@JSR �@�@�@�@@R3 �@�@�@�@�@�@NOP �@�@�@�@�@�@MOV �@�@�@�@R0,R2 �@�@�@�@�@�@MOV.L �@�@�@L15+4,R1 �@�@�@�@�@�@; _d �@�@�@�@�@�@MOV.L �@�@�@R2,@R1 �@�@�@�@�@�@�@; d �@�@�@�@�@�@MOV.L �@�@�@L15+24,R2 �@�@�@�@�@; _str �@�@�@�@�@�@MOV.L �@�@�@@(12,R15),R7�@�@�@�@; h �@�@�@�@�@�@MOV �@�@�@�@#45,R1 �@�@�@�@�@�@�@; H'0000002D �@�@�@�@�@�@AND �@�@�@�@R1,R7 �@�@�@�@�@�@MOV �@�@�@�@R7,R0 �@�@�@�@�@�@MOV.B �@�@�@@(R0,R2),R6�@�@�@�@; str[] �@�@�@�@�@�@MOV.L �@�@�@L15+24,R2 �@�@�@�@�@; _str �@�@�@�@�@�@MOV.B �@�@�@@R2,R6 �@�@�@�@�@�@�@; str[] �@�@�@�@�@�@MOV �@�@�@�@#1,R1 �@�@�@�@�@�@�@�@; H'00000001 �@�@�@�@�@�@MOV �@�@�@�@R1,R0 �@�@�@�@�@�@CMP/EQ �@�@#0,R0 �@�@�@�@�@�@BT �@�@�@�@�@L11 L12: �@�@�@�@�@�@MOV �@�@�@�@#1,R1 �@�@�@�@�@�@�@�@; H'00000001 �@�@�@�@�@�@MOV �@�@�@�@R1,R0 �@�@�@�@�@�@CMP/EQ �@�@#0,R0 �@�@�@�@�@�@BF �@�@�@�@�@L12 L11: �@�@�@�@�@�@ADD �@�@�@�@#16,R15 �@�@�@�@�@�@LDS.L �@�@�@@R15+,MACH �@�@�@�@�@�@LDS.L �@�@�@@R15+,MACL �@�@�@�@�@�@LDS.L �@�@�@@R15+,PR �@�@�@�@�@�@RTS �@�@�@�@�@�@NOP _subf: �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; function: subf �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; frame size=8 �@�@�@�@�@�@.STACK �@�@_subf=8 �@�@�@�@�@�@STS.L �@�@�@PR,@-R15 �@�@�@�@�@�@STS.L �@�@�@MACL,@-R15 �@�@�@�@�@�@MUL.L �@�@�@R4,R5 �@�@�@�@�@�@STS �@�@�@�@MACL,R1 �@�@�@�@�@�@ADD �@�@�@�@R5,R4 �@�@�@�@�@�@MOV �@�@�@�@R4,R0 �@�@�@�@�@�@MOV.L �@�@�@L15+20,R3 ; __divls �@�@�@�@�@�@JSR �@�@�@�@@R3 �@�@�@�@�@�@NOP �@�@�@�@�@�@MOV �@�@�@�@R0,R2 �@�@�@�@�@�@MOV �@�@�@�@R2,R0 �@�@�@�@�@�@LDS.L �@�@�@@R15+,MACL �@�@�@�@�@�@LDS.L �@�@�@@R15+,PR �@�@�@�@�@�@RTS �@�@�@�@�@�@NOP L15: �@�@�@�@�@�@.DATA.W �@�@�@H'0100 �@�@�@�@�@�@.RES.W �@�@�@1 �@�@�@�@�@�@.DATA.L �@�@�@_d �@�@�@�@�@�@.DATA.L �@�@�@_a �@�@�@�@�@�@.DATA.L �@�@�@H'38E38E39 �@�@�@�@�@�@.DATA.L �@�@�@_b �@�@�@�@�@�@.DATA.L �@�@�@__divls �@�@�@�@�@�@.DATA.L �@�@�@_str �@�@�@�@�@�@.SECTION �@�@C,DATA,ALIGN=4 �@�@�@�@; �������� C �Z�N�V���� _str: �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; static: str �@�@�@�@�@�@.SDATA �@�@�@"Hello Embedded World !!" �@�@�@�@�@�@.DATA.B�@�@�@ H'00 �@�@�@�@�@�@.SECTION �@�@D,DATA,ALIGN=4 �@�@�@�@; �������� D �Z�N�V���� _d: �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; static: d �@�@�@�@�@�@.DATA.L �@�@�@H'000003E8 �@�@�@�@�@�@.SECTION �@�@B,DATA,ALIGN=4 �@�@�@�@; �������� B �Z�N�V���� _a: �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; static: a �@�@�@�@�@�@.RES.L�@�@�@ 1 _b: �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; static: b �@�@�@�@�@�@.RES.L �@�@�@1 _c: �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; static: c �@�@�@�@�@�@.RES.L �@�@�@1 �@�@�@�@�@�@.END |
�@�������ꂽ�t�@�C�����݂�ƁA���s�R�[�h�ƃA�h���X�e�[�u���� P �Z�N�V�����ɂȂ�܂��B
const �w��q�̂��������� str �́AC �Z�N�V�����ɂȂ�܂��B
������ str �́Aconst �w��q��t�����Ȃ��f�t�H���g�ł́AD �Z�N�V�����ɔz�u����܂��B
�ϐ����́A�O���[�o���ŏ���������Ă��܂��̂ŁAD �Z�N�V�����ɂȂ�܂��B
�����l�Ȃ��̃O���[�o���ϐ� a, b, c �́AB �Z�N�V�����ɂȂ�܂��B
�@���[�J���ϐ��� e, f, g,h �́A�ʏ�X�^�b�N�̈悪�m�ۂ���܂����A�œK���I�v�V������ݒ肷��ƃ��W�X�^��
����t�����邱�Ƃ�����܂��B�܂��A�œK���ɂ���Ĕ��s�������ȊO�ɉe����^���Ȃ��s�̓R���p�C���Ώ�
����폜����邱�Ƃ�����܂��B
�@�O���[�o���Ő錾���ꂽ�ϐ�����͕ϐ����E������ �h�Q�h �𖼑O�̐擪�ɕt���AEXPORT�錾����܂��B
�܂��A����Z���s�������^�C�����C�u���� __divls �́AIMPORT�錾����Ă��܂��B
�@_main: �� _sub: �ɑ����R�����g�̒��� �hframe size" �Ƃ���܂����A����͂��̊����ŗ��p����X�^�b�N
�T�C�Y�ɂȂ�܂��B
�@�����A�A�Z���u���\�[�X�t�@�C���ɂāA�Z�N�V�����z�u���킩�������ŁA�ݒ�����ɂ��ǂ��܂��B
�@ C �R���p�C���̏o�͌`���@�F�@*.obj
�A C �R���p�C���̐�������f�o�b�O���@�F�@��������B
���A�h���X�̊��蓖��
�@���Z�b�g�X�^�[�g�̗����������܂��B
�@ SH-3 �ɂ́A�X�^�b�N�|�C���^�iSP)�͂���܂��AC �R���p�C���� R15 �� SP �Ƃ��ė��p���܂��̂ŁA
�@�܂� SP �̐ݒ�����܂��B
�A ���ɁA�������𗘗p�ł���悤�ɂ��邽�߁ABSC�i �o�X�X�e�[�g�R���g���[�� �j�̏��������s���܂��B
�@����̗��p����^�[�Q�b�g�{�[�h�ł� SDRAM �̑��� RAM �͓��ڂ��Ă��܂���̂ŁA������ SDRAM �̏���
�@�����K�v�ƂȂ�܂��B
�@���̐ݒ肪�I���܂ŁA�X�^�b�N�iRAM�j�𗘗p����悤�ȃv���O�����i���Ăяo���j�͐���ɓ��삵�܂�
�@��B�������A����̓f�o�b�K�[���BSC�̐ݒ�������Ȃ����߁A���Z�b�g�X�^�[�g�̃v���O�����ɂ͂��̋@�\
�@���������Ȃ��`�Ő������܂��B
�B �������f�[�^�̈� D �Z�N�V�����́ASDARM ��� R �Z�N�V�����փR�s�[���܂��B
�@C �\�[�X�v���O������ D �Z�N�V�����̕ϐ����Q�Ƃ���ɂ́A�R�s�[���� R �Z�N�V�����̕ϐ��ɑ��čs���悤
�@�w�����Ȃ���Ȃ�܂���B�܂��A���������f�[�^�̈� B �Z�N�V�����̓[���N���A���܂��B
�C main �����Ăяo���O�ɁACPU���샂�[�h�iMD)�A�u���b�N�r�b�g�iBL)�A���荞�݃}�X�N�r�b�g�̐ݒ�A
�@���Ȃ킿 SR �̐ݒ���s���܂��B�܂��A���荞�ݏ������s���ꍇ�́AVBR �̐ݒ���K�v�ɂȂ�܂��B
���Z�b�g�X�^�[�g�v���O�����@�� vect7709s.src ��
| ; ********************************************************************************* ; �@���Z�b�g�X�^�[�g ; �@FILE NAME : vect7709s.src ; �@C ����ŋL�q�ł��Ȃ����Ƃ́A�A�Z���u������ŏ����܂��B ; �@�@�@�@ �X�^�b�N�|�C���^�̐ݒ� ; �@�@�@�A VBR �̐ݒ� ; �@�@�@�B SR �̐ݒ� ; �@�@�@�C �X�^�b�N�Z�N�V�����̊m�� ; ********************************************************************************* _INIT_VBR �@�@�@.EQU �@�@�@�@�@H'8C000000 STACK_SIZE �@�@.EQU �@�@�@�@�@1024 �@�@�@�@�@�@�@�@�@.IMPORT �@�@�@_init �@�@�@�@�@�@�@�@�@.EXPORT �@�@�@_RST_VECT �@�@�@�@�@�@�@�@�@.SECTION �@�@�@VECT,CODE,ALIGN=4 _RST_VECT:�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ ; ���Z�b�g�X�^�[�g�͂������� �@�@�@�@�@�@�@�@�@MOV.L �@�@�@�@INIT_STACK,R15 �@�@�@�@�@�@; �X�^�b�N�|�C���^�ݒ� �@�@�@�@�@�@�@�@�@MOV.L �@�@�@�@INIT_VBR,R0 �@�@�@�@�@�@�@�@�@LDC �@�@�@�@�@R0,VBR �@�@�@�@�@�@�@�@�@�@�@; VBR �̐ݒ� ; �������ݒ蓙�A�ŏ��ɕK�v�ȏ���������ꍇ�͒lj����Ă��������B ; �@�@�@�@�@�@�@�@BSR �@�@�@�@�@_INIT_BSC_ETC ; �@�@�@�@�@�@�@�@NOP �@�@�@�@�@�@�@�@�@MOV.L �@�@�@�@INIT_SR,R0 �@�@�@�@�@�@�@�@�@LDC �@�@�@�@�@R0,SR �@�@�@�@�@�@�@�@�@MOV.L �@�@�@�@__init,R3 �@�@�@; �����ݒ胋�[�`���ցi�A���_�[�o�[�̖{����2�{�j �@�@�@�@�@�@�@�@�@JMP �@�@�@�@�@@R3 �@�@�@�@�@�@�@�@�@NOP ; �@�@�@�@�@�@�@�@�@.ALIGN 4 INIT_STACK: �@�@.DATA.L �@�@�@�@_INIT_STACK INIT_VBR: �@�@�@.DATA.L �@�@�@�@�@_INIT_VBR INIT_SR: �@�@�@�@.DATA.L �@�@�@�@H'600000F0 __init: �@�@�@�@�@�@.DATA.L �@�@�@�@_init �@�@�@�@�@�@�@�@�@; ���x�������̃A���_�[�o�[�̖{����2�{ ; �@�@�@�@�@�@�@�@�@.SECTION �@�@�@S,STACK,ALIGN=4 �@�@�@�@�@�@�@�@�@.RES.B �@�@�@�@�@STACK_SIZE _INIT_STACK: ; �@�@�@�@�@�@�@�@�@.END |
�� dbsct.src ��
| ; ********************************************************************************* ; FILE NAME : dbsct.src ; DESCRIPTION : Setting of B,R Section ; CPU TYPE : SH7709S ; ********************************************************************************* �@�@�@.SECTION �@�@�@�@D,DATA,ALIGN=4 �@�@�@.SECTION �@�@�@�@R,DATA,ALIGN=4 �@�@�@.SECTION �@�@�@�@B,DATA,ALIGN=4 �@�@�@.SECTION �@�@�@�@C,DATA,ALIGN=4 ; ; (���x�������̃A���_�[�o�[�̖{����2�{�j __D_ROM �@�@�@.DATA.L (STARTOF D) �@�@�@�@�@�@�@�@�@�@�@�@�@; Start Address of Section D ; (���x�������̃A���_�[�o�[�̖{����2�{�j __D_BGN �@�@�@.DATA.L (STARTOF R) �@�@�@�@�@�@�@�@�@�@�@�@�@; Start Address of Section R __D_END �@�@�@.DATA.L (STARTOF R) + (SIZEOF R) �@�@�@�@�@�@; End Address of Section R ; (���x�������̃A���_�[�o�[�̖{����2�{�j __B_BGN �@�@�@.DATA.L (STARTOF B) �@�@�@�@�@�@�@�@�@�@�@�@�@; Start Address of Section B __B_END �@�@�@.DATA.L (STARTOF B) + (SIZEOF B) �@�@�@�@�@�@; End Address of Section B �@�@�@.EXPORT �@�@__D_ROM �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; �擪�̃A���_�[�o�[�̖{���́A2�{ �@�@�@.EXPORT �@�@__D_BGN �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; �擪�̃A���_�[�o�[�̖{���́A2�{ �@�@�@.EXPORT �@�@__D_END �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; �擪�̃A���_�[�o�[�̖{���́A2�{ �@�@�@.EXPORT �@�@__B_BGN �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; �擪�̃A���_�[�o�[�̖{���́A2�{ �@�@�@.EXPORT �@�@__B_END �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@; �擪�̃A���_�[�o�[�̖{���́A2�{ �@�@�@.END |
�� init.c ��
| /********************************************************************************** �Z�N�V�����̏������ƁAmain ���̌Ăяo�� FILE NAME : init.c ���ʂȑg���݊���R���p�C���̊g���@�\���g���AC ���ꂾ���ł��X�^�[�g�A�b�v ���[�`�����L�q�ł��܂����A�����ł́A�����̋@�\�͎g�킸�ɃV�X�e���̏��������s�� ���̊�(init())�́Avect7709s.src ����Ăяo�����B **********************************************************************************/ extern void main(void); extern int *_D_ROM, *_B_BGN, *_B_END, *_D_BGN, *_D_END; #pragma section START �@�@�@�@�@�@�@�@�@�@�@�@�@/* .section PSTART, CODE, ALIGN=4 */ void _INITSCT(void) { �@�@int *p, *q; �@�@/* �@zero clear�@ */ �@�@for(p = _B_BGN; p < _B_END; p++) �@�@{ �@�@�@�@*p = 0; �@�@} �@�@/*�@ROM �@to �@RAM�@*/ �@�@for(p = _D_BGN, q = _D_ROM; p < _D_END; p++, q++) �@�@{ �@�@�@�@*p = *q; �@�@} } void init(void) { �@/* ���̈ʒu�ɗl�X�ȃV�X�e���̏������������Ă��ǂ� */ �@_INITSCT();�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ /* D ---> R �ւ̃R�s�[�A0 ---> B */ �@main(); �@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@/* main ���Ăяo�� */ �@while(1);�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ /* �����Amain ���烊�^�[�������� */ } |
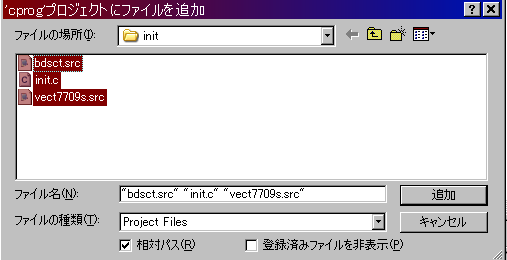
cprog �t�H���_�ɁAinit ���쐬���āA���̃t�H���_���ɃV�X�e���̏������ɕK�v�ȏ�L�R�̃\�[�X�t�@�C����
�쐬���ۑ����܂��B�����āu�v���W�F�N�g�ɒlj��v���A�r���h���܂��傤�B
���@ vect7709s.src, �@init.c, �@dbsct.src �@��

����ʂ̗l�ɁAwarnings ���W�o�͂���܂����B
���R�A����̓Z�N�V�����̃A�h���X�w����s���Ă��Ȃ��ׂł��B
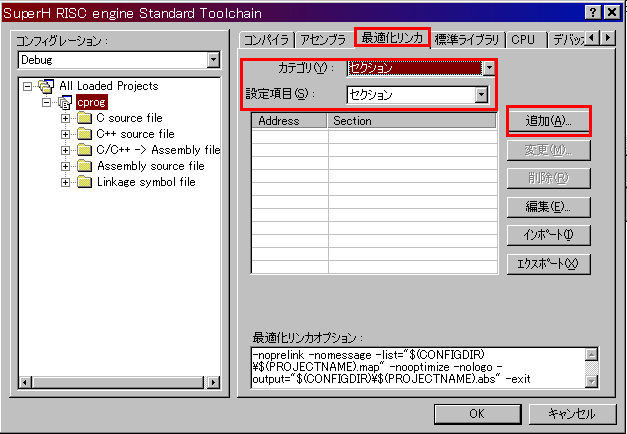
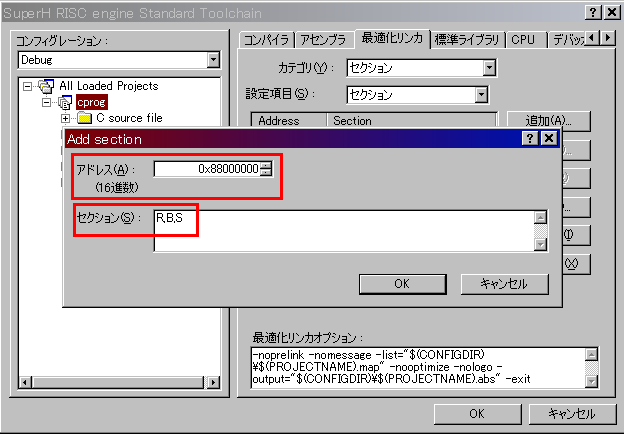
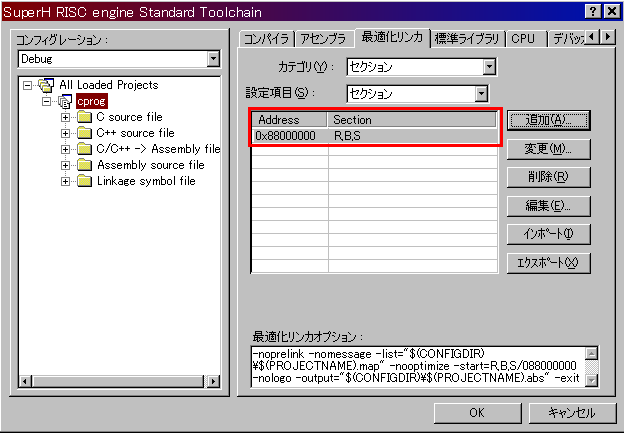
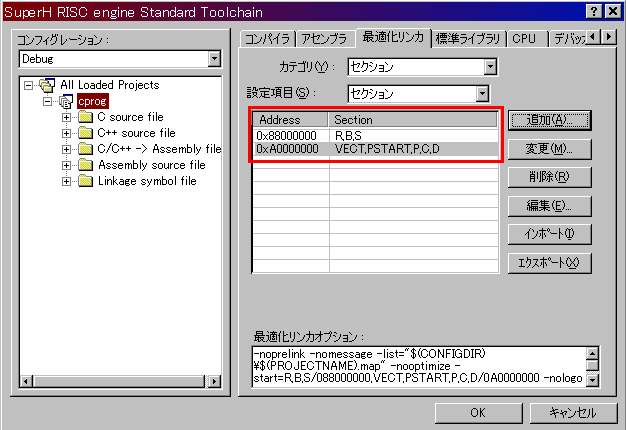
�@�ł́A�����Ŋe�Z�N�V�����֎��A�h���X������t���܂��B
�ȍ~�ł́A�^�[�Q�b�g�V�X�e���ɂ��킹�āA�Z�N�V���� VECT, PSTART, P, C, D �����Z�b�g�X�^�[�g����
H�fA0000000 �Ԓn�ȍ~�̃t���b�V���������̈�ɔz�u���A���ɁA�Z�N�V���� R, B, S �� SDRAM �̐擪�A�h���X
H'88000000 �Ԓn�ȍ~�ɔz�u����l�ɐݒ肵�Ă��܂��B

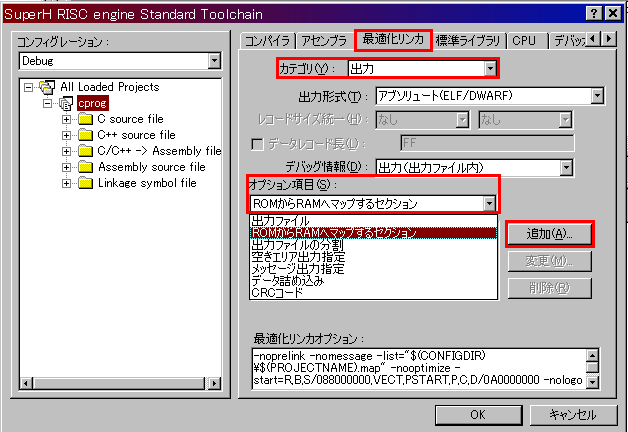
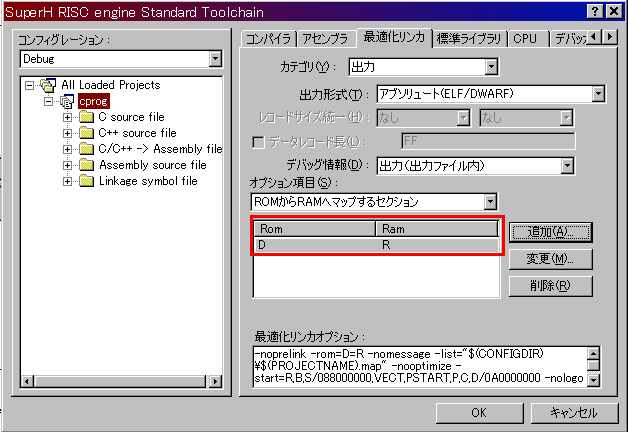
����ʂ́A�����J�̏o�̓t�@�C����ݒ肵�܂��B
�u�I�v�V�����v���j���[�́uSuperH RISC engine Standard Toolchain�E�E�v�̍œK�������J�^�O�ɂ����āA
�o�̓t�@�C���`���́u�A�u�\�����[�g�i ELF�^DWARF �j�v�A�f�o�b�O���͏o�̓t�@�C���̒��ɍ쐬����悤
�ɐݒ肵�܂��B
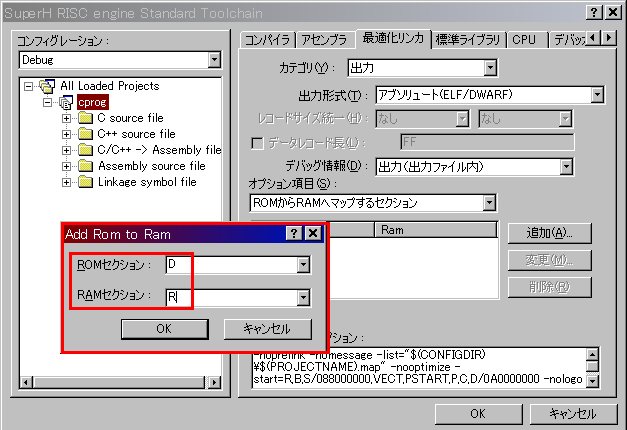
�܂��AD �Z�N�V������ R �Z�N�V�������Q�d�����AD �Z�N�V�������Q�Ƃ���R�[�h�́A���ׂ� R �Z�N�V������
�Q�Ƃ���R�[�h�֕ύX�����悤�Ɏw�肵�܂��B
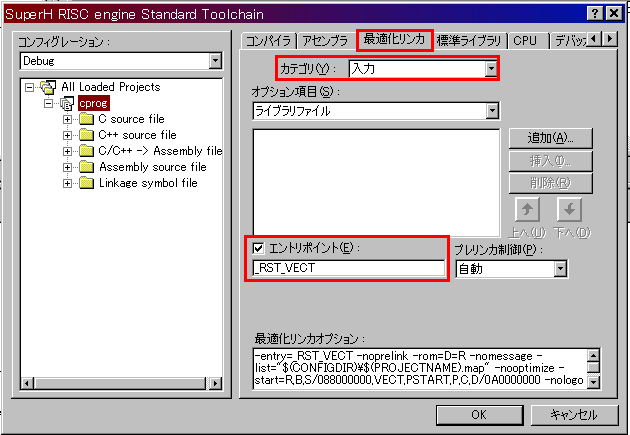
�G���g���|�C���g���w�肵�܂��B����́A�f�o�b�K�Ńf�o�b�O�Ώۃt�@�C����ǂݍ��Ƃ���PC�ɐݒ肳���
�A�h���X�܂��̓��x�����w�肵�܂��B�i�J�e�S���F���́j
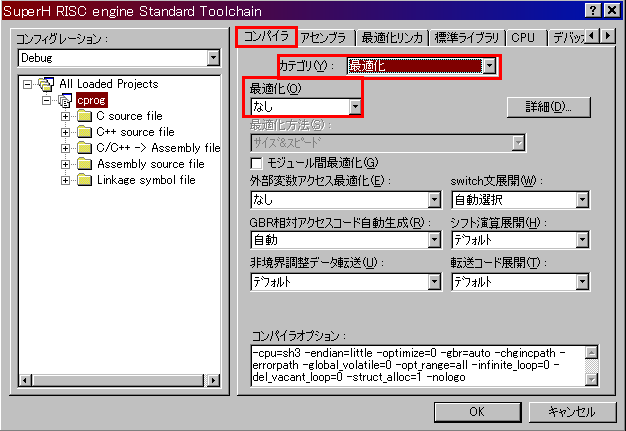
���ɁA�R���p�C���̃^�O��I�����A�J�e�S���F�œK���̍œK���iO)���Ȃ��ł��邱�Ƃ��m�F���܂��B
���̌�A�f�o�b�K�œ���m�F���s�����߁AC �\�[�X�t�@�C���̍œK����}�~����悤�ɂ��Ă��܂��B
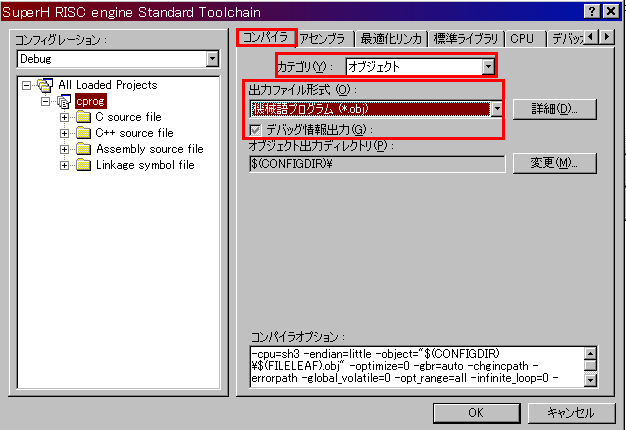
�܂��m�F�ł����A�J�e�S�����I�u�W�F�N�g�Ƃ��A�o�̓t�@�C���@�B��v���O�����A�f�o�b�O��������悤
�Ƀf�o�b�O���o�͂Ƀ`�F�b�N�������Ă��邩�m�F���܂��B
�����m�F�ł����A�A�Z���u���^�O��I�����A�J�e�S���F�I�u�W�F�N�g�Ƃ��ăA�Z���u���\�[�X�t�@�C�����f�o�b
�O���t���ŁA��������悤�ɐݒ肳��Ă��邩�m�F���܂��B

����ŁA���ׂẴI�v�V�����ݒ肪�I���܂����̂ŁA�r���h���܂��B
�G���[�����[�j���O���[���ɂȂ�܂����B
Robot�������̑��@�\�\
�o�i�[�X�y�[�X
�����͂��
�@�@�@�W���j�A���{�b�g�N���u
��619-0237
���s�{���y�S���ؒ�����W����
TEL : 070-5263-2200
FAX : 0774-98-1100
mail : jun@kinet-tv.ne.jp