�����̉Ȋw�Z�p���q�������ɑ����B�@�W���j���{�@��JRO��
��619-0237 ���s�{���y�S���ؒ�����W����
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
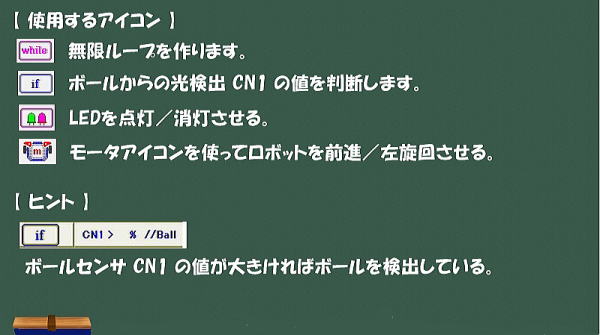
����R�[�X�{�[���Z���T�����C�g�Z���T��RECRUIT
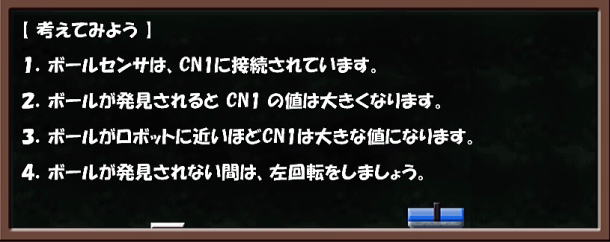
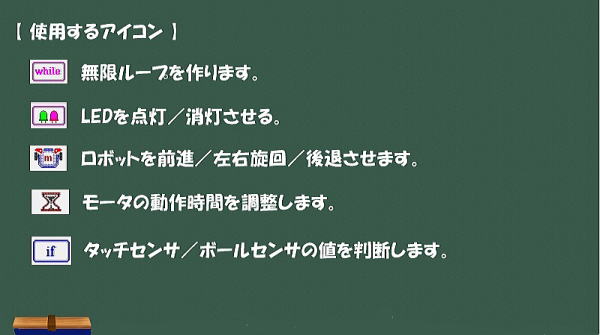
�{�[���Z���T�Ƃ́A�ǂ�ȃZ���T
�{�[���Z���T����ɂ́A���Z���T�ƌĂ��d�q���i�����Ă��܂��B���Z���T�Ƃ́A�Z���T�Ɍ��������鎖�œd�����������܂��B�܂���������d���͌��̋����ɔ�Ⴕ�܂��B
���̎��𗘗p���āA�ԊO���������Ă���{�[����T�������ł��܂��B
�d�����������ƃ{�[���������ɂ��邩�A�������قȂ鏊�ɂ��邱�Ƃ��킩��܂��B
��ɓd���l���ő�ɂȂ�悤�Ƀ��{�b�g�������ƂŁA�{�[�������{�b�g������S�[���։^�Ԏ����\�ƂȂ�܂��B
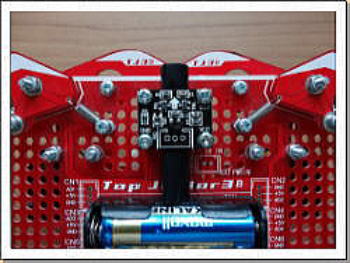

�㕔���������ɂ��鍕�����i���{�[���Z���T��ł��B
�㕔�E���̎ʐ^���A�{�[���Z���T��ɕt���Ă�����Z���T�ł��B
���̃Z���T�̉E��������������Ă���ƌ��ʂɔ�Ⴕ���d�����������܂��B
���̏�Ԃł́A�����l������������荞�݃{�[���ȊO�̎����Ɩ��⑾�z�����ɂ��������邽�߁A���̃Z���T��
�����r�j�[���t�[�h�����������̂ݓ���悤�Ɏ��t���Ă��܂��B
�����F�́A�����z�����₷���̂œ����Ă������̗����ˌ���h�~���Ă��܂��B
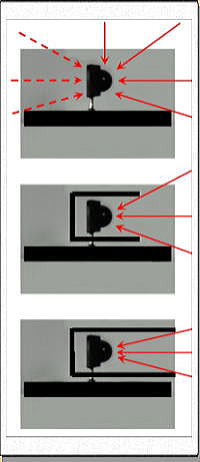 �@���̐}�́A���Z���T�Ɍ������荞�ޗl�q��\�������̂ł��B
�@���̐}�́A���Z���T�Ɍ������荞�ޗl�q��\�������̂ł��B�@�Z���T�����̏�Ԃł́A���̓Z���T�̑S����������荞�݂܂��B
�@���ۂ́A�Z���T�O�ʂɂ̓����Y������̂őO�����̌��𑽂���荞�߂�
�@�l�ɂ͂Ȃ��Ă��܂����A�����͘R��ē��荞�ނ̂Œ��ӂ��K�v�ł��B
�@����������ł��h�~����̂��A�Z���T�Ƀt�[�h����t���đO�������炵��
�@��������Ȃ��l�ɍH�v���܂��B
�@�t�[�h�����鎖�ŁA���O�ʂ���̌������������Ȃ��u�{�[���Z���T
�@�v���o���オ��܂��B
�@���̂��A�œV�䂩��̏Ɩ������ጸ�����鎖���ł��܂��B
�@2013�N�x�̃��{�J�b�v�W���j�A�̃T�b�J�[����A�p���X�{�[���̍�
�@�p�ŊO�����i �Ɩ��A���z���� �j�̉e�����Ȃ�����ׂ̍H�v������Ă���
�@���B����ɂ��p���X�{�[���Ή��́u�{�[���Z���T��v�Ɍ�������K�v
�@���L��܂������Ɏg���Ă�����Z���T�͓��������g�p���Ă��܂��B
�@�i ���Z���T�̌����͓����Ŏg�p���@���قȂ� �j
�@
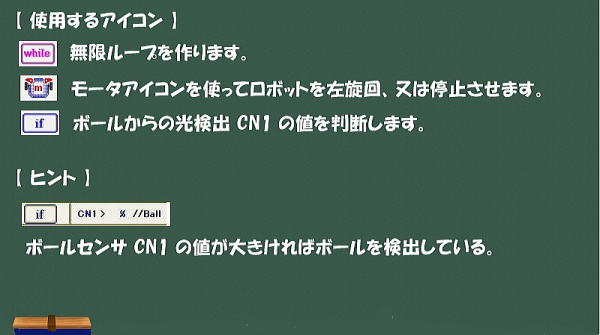
�m STEP �P �n
�@�{�[�������ʼn�]��~
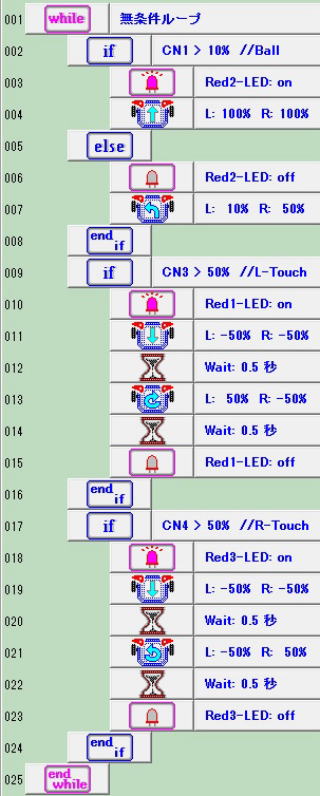
| �m �T���v���v���O���� �n �@���L�v���O�����͊g��ł��܂��B
|
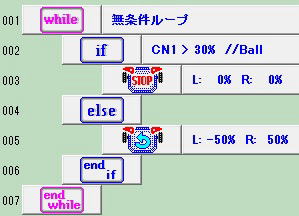
| �y �������Ă݂܂��傤 �z �@�ǂ��ł������H �@�v���ʂ�̓��������܂������H �@�{�[�������o�ł��Ȃ������l�́A���{�b�g��360�x��]�i��ʼnĂ��������j���āA���̎��̃{�[���Z �@���T����̒l�i CN1 )���`�F�b�N���ĉ������B �@���Ԃ�ǂ����̕����i�{�[�����L������j�ŁA�R�O���ȏ�̖��邢�����L�����Ǝv���܂��B �@����ł����{�b�g����~���Ȃ��ꍇ�́A��]���x���������Ă���\��������܂��̂ʼn�]���x( 50% ) �@���S�O���A�R�O�������x�𗎂Ƃ��Ċm�F���ĉ������B |
| �y ���{�b�g�̓������L�^���Ă����܂��傤 �z �@����̏ꍇ�́A�{�[���Z���T�̓����𑪒肵�L�^���܂��傤�B �@�@�@�{�[���ƃ��{�b�g�̋����� CN1 �̏o�͒l�Ƃ̊W �@�@�@�������߂�����A���X�ɉ������Ă����A���̎��̃Z���T�o�͂��L�^���܂��B �@�A�@�{�[���ƃ��{�b�g����苗����������ԁi�Ⴆ�P�O�����j�ŁA���{�b�g����������]���ꂽ�� �@�@�@�̃Z���T�o�͂��L�^����B �@�@�@����́A�{�[���Z���T�̎���p�i�ǂ��܂Ń{�[�������E���o����\�͂����邩�j���킩��܂��B �@�@�@���ۂ́A�O������h�����ߍ����`���[�u�����Ԃ��Ă킴�Ǝ���p���������Ă��܂��B |
�@
�m STEP �Q�n
�@�{�[����ǂ�������
| �m �T���v���v���O���� �n �@���L�v���O�����͊g��ł��܂��B
|

| �y �������Ă݂܂��傤 �z �@�ǂ��ł������H �@�v���ʂ�̓��������܂������H �@�O��ƃv���O�����Ƃ��ẮA�{�[�����o���Ē�~�����邩�A�S���͒��i���̈Ⴂ�ł��̂Ŗ��͂Ȃ��� �@�������܂��B �@�{�[���̌��o���x�����u�P�O���v�Ƃ��Ă��܂��̂ŁA��艓���̃{�[�������o�ł��܂������{�b�g���u �@����Ă�����ɂ��{�[���������̂Ƀ{�[�������o�������������\���������Ȃ�܂��B �@�Z���T�[���j�^�[�Ŋm�F���Ă���A�{�[�����f�u�������l�v��ݒ肵�܂��傤�B |
�@
�m STEP �R�n
�@�^�b�`�ŕ����]�����ă{�[����ǂ�
| �m �T���v���v���O���� �n �@���L�v���O�����͊g��ł��܂��B
|
| �y �������Ă݂܂��傤 �z �@�ǂ��ł������H �@�v���ʂ�̓��������܂������H �@�����v���O�����������Ȃ�܂������A��L�̗l�ɋ@�\�ʂɕ����Ă݂�ƍ��܂ō쐬���Ă����v���O���� �@���Ȃ��������̕��ɂȂ��Ă��܂��B �@�����̃v���O�����ɂȂ������́A�^�C�v�~�X�ɏ\�����ӂ��܂��傤�B |
�@
�m STEP �S�n
�@�Z���T�������Ă݂܂��傤
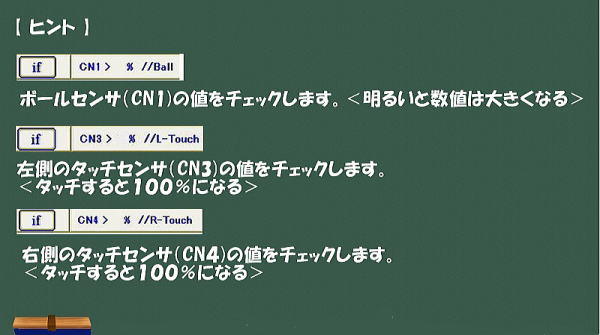
�@�{�[���Z���T���瓾����l��m�鎖�̓v���O�������쐬�����ő�Ϗd�v�ł��B�@����̏ꍇ�ł́A���{�b�g�ƃ{�[���ł̋����ɂ��l��m�鎖�ŁA���ꂼ��̔���l��ݒ肷�邱�Ƃ��ł��܁@���B
�@���၄
�@�{�[���������ꍇ�@�@�@�@�@�@�F�@�@�T
�@�{�[�������{�b�g�ɋ߂����@�@�F�@�V�O
�@�{�[�������{�b�g���牓�����@�F�@�R�O�@�@�@�Ƃ������ɂ́A
�@�{�[���̔���l�́A�i �R�O�{�T �j�^ �Q �� �P�V�D�T�@�@�P�V ���� �P�W ���x�ɐݒ肵�܂��B
| �y C-Style �J���Z���T������@ �z �܂��A�p�\�R���ƃ��{�b�g�ɒʐM�P�[�u����ڑ����āA���{�b�g�̓d�������ă|�[�g�ݒ�����O�ɐݒ肵�Ă����܂��傤�B �@�@�I�v�V�������ɂ���u�Z���T�[���j�^�[�v��I�����܂��B 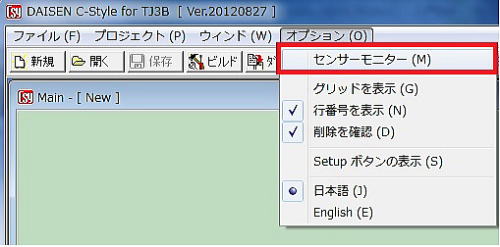 �A�@���L�Z���T�[���j�^�[��ʂ��\������܂��B 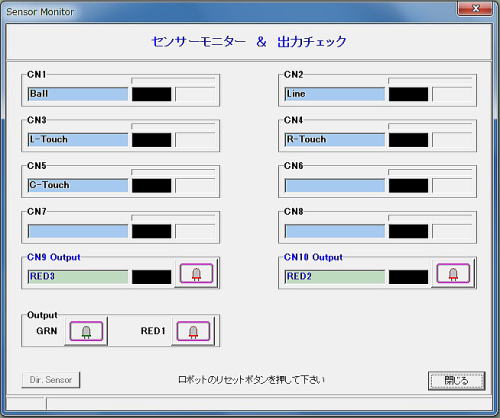 �B�@���{�b�g�̓d���������Ă��Ȃ��ꍇ�͓d��������B�����Ă����ꍇ�̓��Z�b�g�X�C�b�`�������B  �@�{�[���Z���T�i CN1 ) �̒l�͂W�P���ƕ\������Ă��܂��B�� ���{�b�g�̋߂��ɁA�{�[�����L��܂��B�� |
�@�����l�ł����B
�@�ȏオ�{�[���Z���T���g�����T���v���\�t�g�ł����B
�@
�@���N�x�̃��{�J�b�v�W���j�A���Z���i�Q�O�P�R�N�x�j�̃T�b�J�[�{�[���́A�A�����̐ԊO�������{�[������
�@�p���X�_���̐ԊO�������{�[���ɂ����܂����B�ύX�̗��R�͈ȉ��̒ʂ�ł��B
�@�@�@�@�d�r�̏��Ղ��������B�i ���A�p�ɂɓd�r�������K�v�ł������B�j
�@�@�A�@�O�����ɋ����Ȃ�i ���Z���̑��A�o������ɈÖ����Ă��������݂͕s�v �j
Robot�������̑��@�\�\
�o�i�[�X�y�[�X
�����͂��
�@�@�@�W���j�A���{�b�g�N���u
��619-0237
���s�{���y�S���ؒ�����W����
TEL : 070-5263-2200
FAX : 0774-98-1100
mail : jun@kinet-tv.ne.jp