�����̉Ȋw�Z�p���q�������ɑ����B�@�W���j���{�@��JRO��
��619-0237 ���s�{���y�S���ؒ�����W����
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
����R�[�X���C���g���[�XRECRUIT
���C���Z���T�Ƃ́B�ǂ�ȃZ���T�@

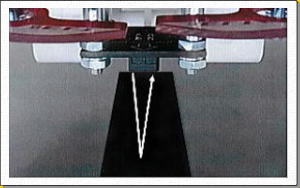
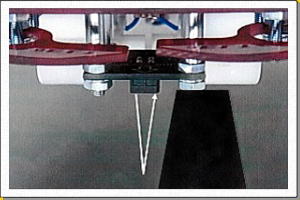
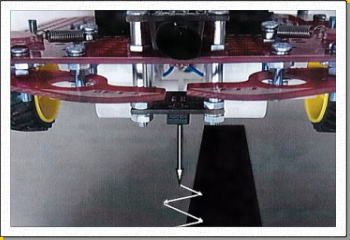
�@���C���Z���T�́A���{�b�g�̉����ɏ��Ɍ����Ď�t����Ă���Z���T�ł��B�i ��} �j
 �@���}�͏��ʂ��烍�{�b�g�̉����������ʐ^��
�@���}�͏��ʂ��烍�{�b�g�̉����������ʐ^���@���C���Z���T�����̊g��ʐ^�ł��B
�@�����ۂ������Q�����܂����A�����Ă����
�@�̓����Y�ł��B�i�����Y�̉��ɔ����_�C�I�[
�@�h�^����f�q������܂��B�j
�@���̊ۂ���������ԊO�����o�Ă��܂��B
�@���̌��������甽�˂��ĉE���̐ԊO�������o
�@����Z���T�i����f�q�j�ɓ���܂��B
�@���ʂ̐F�ɂ����̗ʂ��ω����邱�Ƃ𗘗p
�@���āA���F�A���F�f�����邱�Ƃ��s����
�@���B
�@������̍ޗ��ɂ���Ă����̔��˂����
�@���ω����܂��̂ŏ����Ƃɒ������K�v�ł��B
�@���̔��˂ɑ���Z���T����̏o�͓d���́A�����悻���L�̊W������܂��B�i ���\���́A���̋z���� �j
�@����̓Z���T�ʂƏ��̋����A�Z���T��ɂ��Ă��钲���{�����[���̈ʒu�ɂ���đ傫���ω����܂��B
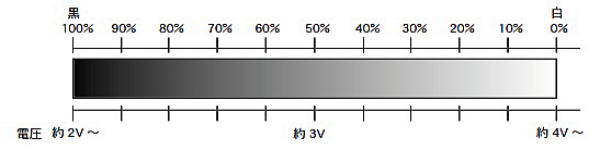
�@�@��L�̍��������ł́A���˂����Ȃ��P�O���ȉ��@�@�@�@��L���������ł́A���˂��傫���T�O���ȏ�
�i ������̍ޗ��A�����̍ޗ��ɂ��傫�����l�͕ς��܂��̂ŁA���ۂ̃R�[�X�Ŋm�F���Ă��������B�j
�@TJ3B�̃��{�b�g�ł́A�Z���T�͏������P�Omm�Ɏ�t���Ă��܂��B
�@�莝���̃��{�b�g�Ǝ莝���̔���p���Ŋm�F�������e�ł́A���F��p���Ŗ� �Q�D�O[ V ]�A���{�b�g�������グ
�@����ԁi���˂�������ԁj�� �O�D�O�S[ V ] ���x�ƂȂ��Ă��܂����B
�@�Z���T�̏o�͏�Ԃ��m�F����ɂ́AC-Style �̃Z���T���j�^�[�@�\�Ŋm�F���鎖���ł��܂����g�p���@�͌��
�@�������܂��B
�@
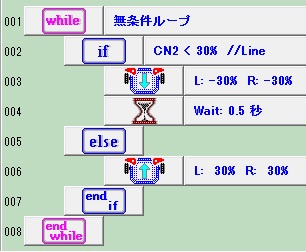
�y STEP �P �z
�����C����������A���{�b�g����ނ����܂��傤�B
| �m �T���v���v���O���� �n C-Style�����́A�g��ł��܂��B
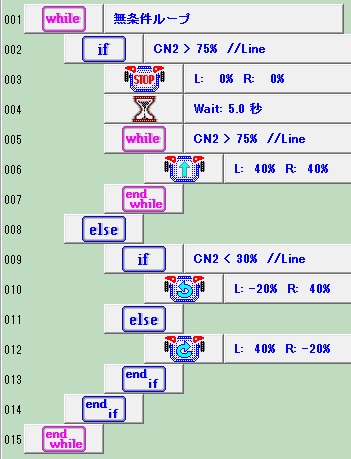
��L�T���v���v���O�����́ACN�Q�̃f�[�^�[�����L�ł������O��Őݒ肳�ꂽ���̂ł��B �@���F���C���ł�CN2�̒l�@�F�@ 9 �` 13 ���x �@���F���C���ł�Cn2�̒l�@�F�@51 �` 58 ���x �@�����蕪���l�i�������l�j�@�F�@30���@�@�v�Z�F�i 13 �{ 51 �j�^�Q �� 32 �i����͂R�O�Ƃ����B�j |
| �m �������Ă݂܂��傤�B �n �@�ǂ��ł������H �@�v���ʂ�̓��������܂������H �@���܂������Ȃ������l�́A002 �s�� if ���ł̔������f���鐔�l�i �������l �j���A�K���ł͂Ȃ������ׁ@�ł��B �@���C���Z���T�́A������̔��ˌ��𑪒肵�Ă��܂��̂ŁA���ɂ��锒�F����̔��ˁA������̔��˂́A�@���ޗ��A���C���ޗ����ŕς���Ă��܂��̂ő��s�O�ɔ��ˌ����ǂ�قǂ����`�F�b�N���Ă݂܂��傤�B �@���܂��������l���m�F���܂��傤�B���܂��ܓ������Ƃ��M���M���̏�Ԃœ������\��������܂��B �y �悭���銨�Ⴂ �z
|

�@
�y STEP �Q �z
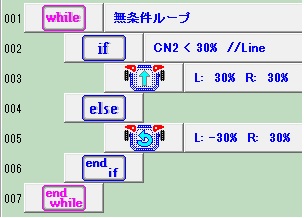
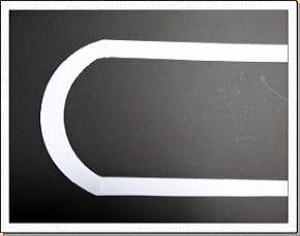
�����C�����g���[�X����v���O����������Ă݂܂��傤�B�i ���܂�� �j
�@�܂��͍����C�������܂�����Ńv���O����
�@���l���Ă݂܂��傤�B
�@�����C������O�ꂽ�ꍇ�A���C���͕K������
�@�ɂ��邱�Ƃ��l���č쐬���ĉ������B
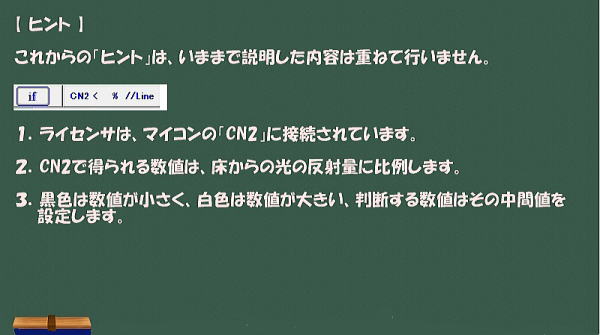
�y �q���g �z
�@�O��Ɠ����ł����e�ł��̂ŏȗ����܂��B
| �m �T���v���v���O���� �n C-Style�����́A�g��ł��܂��B
�������l�R�O���̍l�����́ASTEP�P�Ɠ����ł��B |
| �m �������Ă݂܂��傤�B �n �@�ǂ��ł������H �@�v���ʂ�̓��������܂������H �@���܂������Ȃ������l�́A002 �s�� if ���ł̔������f���鐔�l�i �������l �j���A�K���ł͂Ȃ������ׁ@�ł��B �@���C���Z���T�́A������̔��ˌ��𑪒肵�Ă��܂��̂ŁA���ɂ��锒�F����̔��ˁA������̔��˂́A�@���ޗ��A���C���ޗ����ŕς���Ă��܂��̂ő��s�O�ɔ��ˌ����ǂ�قǂ����`�F�b�N���Ă݂܂��傤�B �@���܂��������l���m�F���܂��傤�B���܂��ܓ������Ƃ��M���M���̏�Ԃœ������\��������܂��B �@���̃T���v���\�t�g�́A �@�@�P�D���C���̓����͂��܂��g���[�X�o���Ȃ��B �@�@�Q�D�~�`�̃R�[�X�łȂ��ƃg���[�X�o���Ȃ��B �@�@�R�D�E�܂��o���Ȃ��B |
�@
�y STEP �R �z
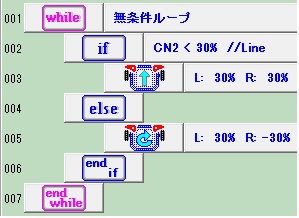
�����C�����g���[�X����v���O����������Ă݂܂��傤�B�i �E�܂�� �j
�@���͍����C�����E�܂�����Ńv���O����
�@���l���Ă݂܂��傤�B
�@�����C������O�ꂽ�ꍇ�A���C���͕K���E��
�@�ɂ��邱�Ƃ��l���č쐬���ĉ������B
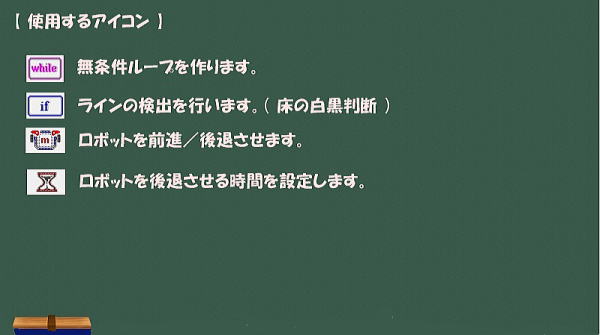
�y �g�p����A�C�R�� �z
�@�O��Ɠ������e�ł��̂ŏȗ����܂��B
�y �q���g �z
�@�O��Ɠ������e�ł��̂ŏȗ����܂��B
| �m �T���v���v���O���� �n C-Style�����́A�g��ł��܂��B
|
| �m �������Ă݂܂��傤�B �n �@�ǂ��ł������H �@�v���ʂ�̓��������܂������H �@���܂������Ȃ������l�́A002 �s�� if ���ł̔������f���鐔�l�i �������l �j���A�K���ł͂Ȃ������ׁ@�ł��B �@���C���Z���T�́A������̔��ˌ��𑪒肵�Ă��܂��̂ŁA���ɂ��锒�F����̔��ˁA������̔��˂́A�@���ޗ��A���C���ޗ����ŕς���Ă��܂��̂ő��s�O�ɔ��ˌ����ǂ�قǂ����`�F�b�N���Ă݂܂��傤�B �@���܂��������l���m�F���܂��傤�B���܂��ܓ������Ƃ��M���M���̏�Ԃœ������\��������܂��B �@���̃T���v���\�t�g�́A �@�@�P�D���C���̓����͂��܂��g���[�X�o���Ȃ��B �@�@�Q�D�~�`�̃R�[�X�łȂ��ƃg���[�X�o���Ȃ��B �@�@�R�D���܂��o���Ȃ��B |
�@
�y STEP �S �z
�����C�����g���[�X����v���O����������Ă݂܂��傤�B�i ���E����Ȃ��F�ėp�v���O���� �j
�@���͍����C�������E����Ȃ��̃v���O����
�@���l���Ă݂܂��傤�B
�@�ǂ�ȃ��C����ł����F���C���g���[�X����
�@�\�ȃv���O�����Ȃ̂ʼn��p�͈͂��L����܂�
�y �g�p����A�C�R�� �z
�@�O��Ɠ������e�ł��̂ŏȗ����܂��B
�y �q���g �z
�@�O��Ɠ������e�ł��̂ŏȗ����܂��B
| �m �T���v���v���O���� �n C-Style�����́A�g��ł��܂��B
|
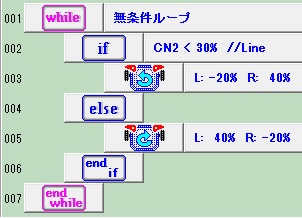
| �m �������Ă݂܂��傤�B �n �@�ǂ��ł������H �@�v���ʂ�̓��������܂������H �@��]�p�̒����ɂ��A���{�b�g�̃g���[�X�X�s�[�h���ω�������A���C������E�������肵�܂��B �@�œK�Ȋp�x��T���܂��傤�B�X�s�[�h���グ�悤�Ƃ���ƒE������\���������Ȃ�܂��B �@��]�p�x��傫������ƃX�s�[�h�͒x���Ȃ�܂����A�J�[�u���}�ȃ��C���ł��Ή��ł��܂��B �����@��]�p�@���� �@��]�p���傫���Ƃ́@�F�@�i�@L�@�F�@�|�R�O���@�A�@R�@�F�@�U�O���@�j�Ȃ� �@��]�p���������Ƃ́@�F�@�i�@L�@�F�@�@�@�O���@�A�@R�@�F�@�R�O���@�j�Ȃ� �@�������i�@L �@�F�@�|�R�O���@�A�@R�@�F�@�R�O���@�j�ł́A���]���đO�ɂ͐i�܂Ȃ��B |
�@
�y STEP �T �z
�����C�����g���[�X����v���O����������Ă݂܂��傤�B�i ���E����Ȃ��F�ėp�v���O���� �j
�@���C���Ə��̐F�����]�����ꍇ�ɂ́A�v���O������
�@�ǂ̗l�ɂ�������ł��傤���B
�y �g�p����A�C�R�� �z
�@�O��Ɠ������e�ł��̂ŏȗ����܂��B
�y �q���g �z
�@�O��Ɠ������e�ł��̂ŏȗ����܂��B
| �m �T���v���v���O���� �n C-Style�����́A�g��ł��܂��B
|
| �m �������Ă݂܂��傤�B �n �@�ǂ��ł������H �@�T���v���\�t�g��A�܂������O��ƕς��͂���܂���B �@����́A���{�b�g�̃��C���Z���T�iCN2�j�́A���ƍ����C���Ƃ����蕪�������Ă����ł͂���܂� �@��B�����܂ł����F�Ɣ��F�Ƃ��Ĕ��f���A���̒��Ԓl���u�������l�v�Ƃ��Ă���̂Ŕ��������]���Ă� �@���f�����͂܂����������ƂȂ�܂��B |
�@
�y STEP �U �z
���C����ɂ����e�[�v�ŁA���{�b�g���~�����܂��傤�B
�@���ʐ^�̍����C���㑤�������ɋ�F�e�[�v���\���Ă�
�@�肱���Ń��{�b�g���~�����܂��B
�y �g�p����A�C�R�� �z
�@�O��Ɠ������e�ł��̂ŏȗ����܂��B
| �m �T���v���v���O���� �n C-Style�����́A�g��ł��܂��B
|
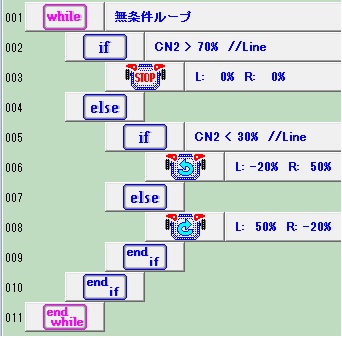
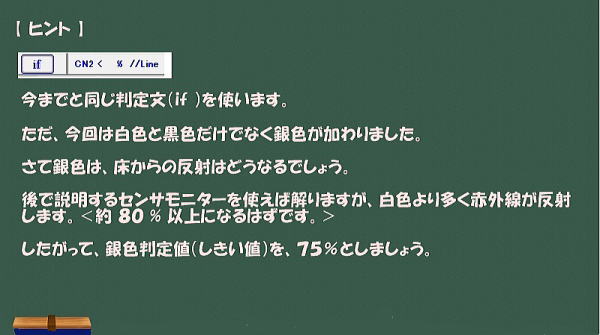
| �m �������Ă݂܂��傤�B �n �@�ǂ��ł������H �@����̃|�C���g�́A��e�[�v��ł͌��͂قƂ�ǂ����˂��Ă��܂��̂Ń��{�b�g�ɂ�葽���̍��͂��� �@�܂����A���ϓI�� �W�T ���ȏ゠��̂ŁA�������l���u�V�O���v�Ƃ��Ă��܂��B �@ �@���F�@�F�@�P�O���O��i ���F�̎��ނɂ���āA�P���ɂȂ�ꍇ������܂� �j �@���F�@�F�@�T�T���O��i ���F�̎��ނɂ���āA�U�O�����x�ɂȂ�ꍇ������܂� �j �@��F�@�F�@�W�T���O�� �@�����������Z���T���j�^�ŐF�X�ȍޗ��̔��˗����m�F���Ă݂܂��傤�B |
�@
�y STEP �V �z
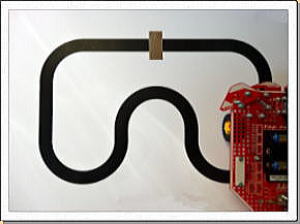
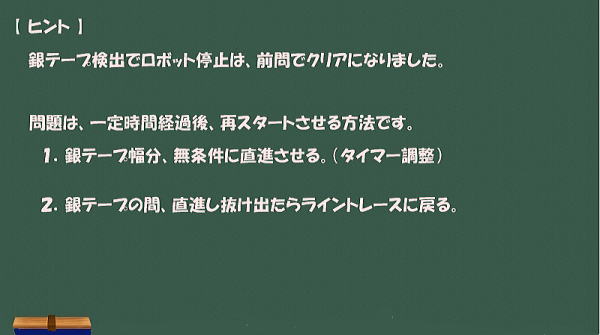
���C����ɂ����e�[�v�Ń��{�b�g���T�b�Ԓ�~�����A���̌�ăX�^�[�g������B
�@�R�[�X�͑O��Ɠ����ł��B
�@����́A��e�[�v�Œ�~���Ĉ�莞�Ԍo�ߌ�A�ăX�^
�@�[�g��������ł��B
�y �g�p����A�C�R�� �z
�@�O��Ɠ������e�ł��̂ŏȗ����܂��B
| �m �T���v���v���O���� �n C-Style�����́A�g��ł��܂��B �� Sample�P ���^�C�}�[����
�� Sample 2 ����e�[�v�������
|
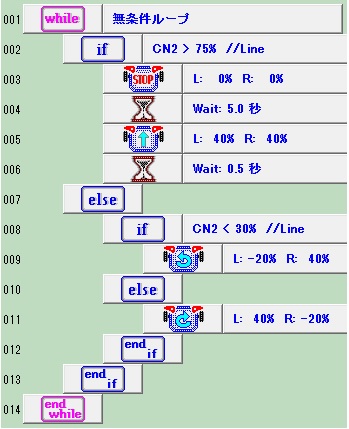
| �m �������Ă݂܂��傤�B �n �@�ǂ��ł������H �@Sample�P�́A���܂ł̃T���v���Ɠ�����@���g���Ă���̂ŗ������ł����Ǝv���܂��B �@Sample�Q�́Awhile ���̕ς�����g�����ł��B���܂ł� while ���̓��[�v�������u�������[�v�v�Ƃ��� �@�g���Ă��܂������A����̓��[�v�������Z���T���i CN2 �j�Ƃ��܂����B �@��̓I�ɂ́ACN�Q�̏�V�T���ȏ�i��e�[�v�j�̊Ԃ͒��i����ׁA��e�[�v�̒������ω����Ă��� �@�����邱�Ƃ��ł��܂��B��e�[�v�������Ȃ�Βʏ�̃��C���g���[�X�����ɖ߂�܂��B |
�@
�y STEP �W �z
��e�[�v�Ń��{�b�g���T�b�Ԓ�~�A��~��LED�i�ԁj��1�b�Ԋu�œ_�ł����A���̌�ăX�^�[�g������B
�@����������e�́A�O��Ƃ܂����������ł��B
�@�����A���{�b�g����e�[�v��Œ�~���Ă���Ԃ�
�@LED�i�ԁj��1�b�Ԋu�œ_�ł����鏈�����lj��ł��B
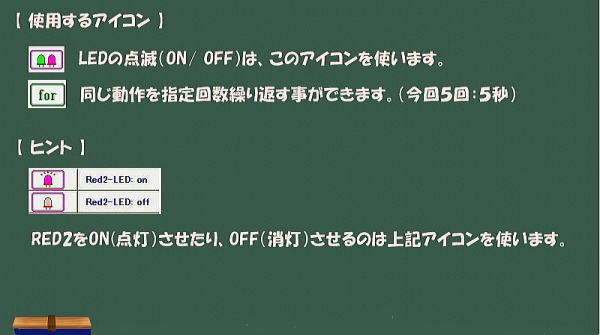
| �m �T���v���v���O���� �n C-Style�����́A�g��ł��܂��B �� Sample�P ����e�[�v�������
|
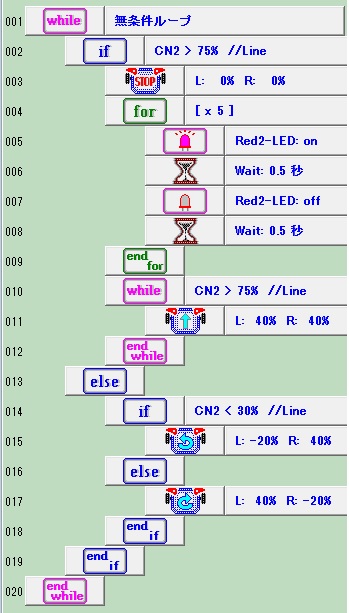
| �m �������Ă݂܂��傤�B �n �@�ǂ��ł������H �@�����LED��_�ł�������@���w�т܂����B����LED�����l�ɓ��삳���邱�Ƃ��ł��܂��B �@��x�g���C���܂��傤�B�i �ΐFLED�A�ԐFLED�P�A�ԐFLED2�A�ԐFLED�R �j |
�@
�y STEP �X �z
�Z���T�������Ă݂܂��傤�B
�@�Z���T�̏��́A�ʐM�P�[�u����ʂ��ăp�\�R����Ŋm�F���邱�Ƃ��ł��܂��B�@�Z���T���瓾����l��m�鎖�̓v���O�������쐬�����ő�Ϗd�v�ł��B
�i �� �j
�@���F�̒l�@�F�@�@�T
�@���F�̒l�@�F�@�U�O
�@��F�̒l�@�F�@�W�T�@�@�Ƃ����ꍇ�i ���A���{�b�g�ɂ��l�͕ς��܂��B�j
���@��������l�̌v�Z�@��
�@�@�i ���F�����̒l �{ ���F�����̒l �j�^�@�Q�@���@ ����l
�@�@�@�@�@�@�T�@�@�{�@�@�@60�@�@�@�@�^�@�Q�@���@32.5�i 32�@���́@33 �j
���@��F����l�̌v�Z�@��
�@�@�i ��F�����̒l �{ ���F�����̒l �j�^�@�Q�@���@ ����l
�@�@�@�@�@�@85�@�@�{�@�@�@60�@�@�@�@�^�@�Q�@���@72.5�i 72�@���́@73 �j
���@C-Style ����Z���T������@�@��
�@�@�I�v�V�������j���[���ɂ���Z���T�[���j�^�[��I�����܂��B

�A�@���L�Z���T�[���j�^�[��ʂ��\������܂��B
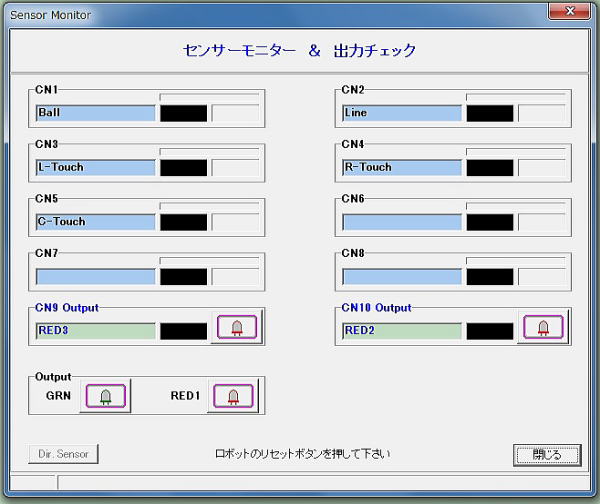
�B�@�p�\�R���ƃ��{�b�g�ɒʐM�P�[�u����ڑ����āA���{�b�g�̓d�������ă��Z�b�g�X�C�b�`�������B
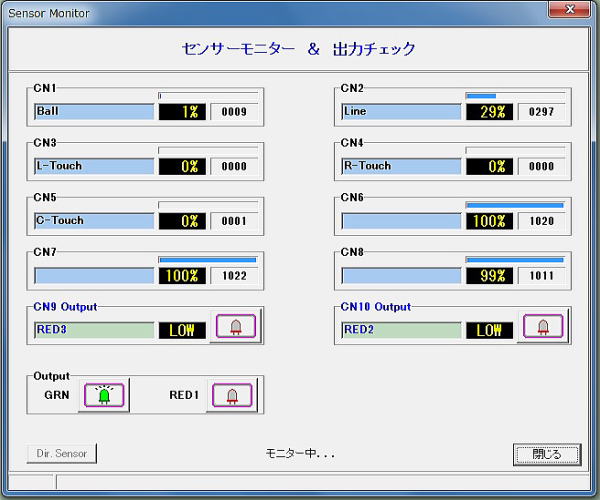
�@�������̃��C���Z���T�́ACN2��Line���̒l�����܂��B
�@�Z���T�̒l�́A0�@�`�@1023�@�͈̔͂ŕω����܂��B����̓Z���T����̃A�i���O�d�����f�W�^���ɕϊ�����
�@��H�ł��܂�܂��B
�@���F�́A�O �ɋ߂��l�ɂȂ�܂��B
�@���F�́A�P�O�Q�R�ɋ߂��l�ɂȂ�܂��B
�@�܂��A���ڏ�L���l���g���Ă��ǂ��ł����A����Ղ� �h���h �\������ʓI�Ɏg���Ă��܂��B
�@�� �\���́A�ȉ��̗l�ɂȂ��Ă��܂��B
�@ ( 297 / 1024 ) X 100 = 29 [ % ]
�@�����ꂳ�܂ł����B
�@�ȏオ�A���C���Z���T���g�������C���g���[�X�̊�{������Ă��܂����B
�@����́A1�̃��C���Z���T���g�������ł������A���X���[�X�Ƀ��C�����g���[�X����ɂ͕����̃Z���T
�@���g���܂����A����͏㋉�R�[�X�ŕ����Ă����܂��B
�@�i ���{�J�b�v���ɑΉ����悤�Ƃ������x�ȃ��C���g���[�X �j
Robot�������̑��@�\�\
�o�i�[�X�y�[�X
�����͂��
�@�@�@�W���j�A���{�b�g�N���u
��619-0237
���s�{���y�S���ؒ�����W����
TEL : 070-5263-2200
FAX : 0774-98-1100
mail : jun@kinet-tv.ne.jp