�����̉Ȋw�Z�p���q�������ɑ����B�@�W���j���{�@��JRO��
��619-0237 ���s�{���y�S���ؒ�����W����
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
����R�[�X�A�N�`���G�[�^�[�m ���[�^�[�쓮 �nRECRUIT
 �@�܂��́A�Z�C�J�����̐������Ă��������B
�@�܂��́A�Z�C�J�����̐������Ă��������B�@�@�P�D�@�Ԍ^�̃��{�b�g�����ׂɂ́A�ǂ���������̂ł��傤���B
�@�@�Q�D�@�Ȃ��A�Q�̃��[�^�[���g���̂��B
�@�Ȃǂ̉�������܂��B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���ʂɒ��ӂ��ĉ������B
���[�^�[���A�ǂ̂悤�ɂ܂킵�Ă���̂��B
�m�P�n���{�b�g�Ƀ��[�^�[���Q���闝�R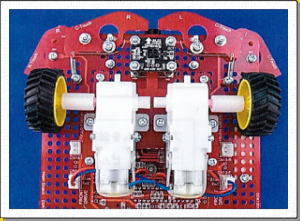
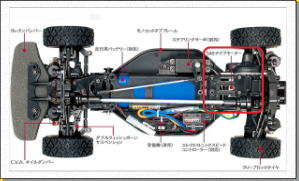
�@��ʂ̎ԂƂ����W�R���J�[�Ȃǂ́A�G���W���i���[�^�[�j�P�ŋ쓮����Ă��܂��B
�Ԃ̕����́A�n���h���i�T�[�{���[�^�[�j���g���Đi�ޕ�����ς��Ă��܂��B
�@����ɑ���TJ3B�́A�M�����[�^�[�Q�ŕ��������߂Ă��܂��B���̗��R�͏�}�E���̃��W�R���J�[�������
�킩��܂������ɕ��G�ȍ\���ɂȂ蕔�i�_���������g��������ޗ���������Ȃ胍�{�b�g���ނƂ��đ�����
���Ȃ����߂ł��B
�@���_�́A�Q�̃M�����[�^�[�̉�]���Ƀo���c�L������Ɠ����X�s�[�h���v���O�������Ă��܂������i�܂Ȃ�
���Ƃł��B���{�b�g���܂��������点��ɂ͍��E�̃X�s�[�h�������K�v�����m��܂���B
�m�Q�n���[�^�[��]�����i ���]�^�t�] �j���ւ���d�g��
�@���[�^�[�̉�]�����́A���[�^�[�ɐڑ�����d�r�́{�|��ς��邱�Ƃłł��܂��B
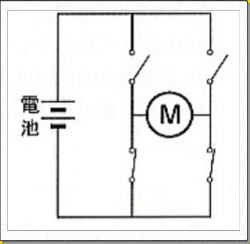
������}�C�R�����獂���ɐ�ւ�����@�Ƃ��āA�S�̓d�q�I�ȃX�C�b�`���fH�f�^�ɔz�u����H�u���b�W��H��
�S�̃X�C�b�`�̂ǂ̃X�C�b�`�����肷�邩�Ń��[�^�[�ɉ����d��������ς��ĉ�]�������䂵�Ă��܂�
�@�X�C�b�`�̊eON�^OFF�Ɛ��]�E�t�] �@�܂��@����ɑΉ������v���O�����͉��L�̐}�Ɏ����܂��B

�@���L�}����{�^��H�}�ł��B
�uH�v�̌`�����Ă���̂ŃG�b�`�u���b�W��H�ƌĂ�Ă��܂��B
�@���L�̗l�ɂS�̃X�C�b�`�����L�̗l�ɐ�ւ��鎖��
�@�@�@�t���[����i TJ3B�ł́A����ł��܂���B�j
�@�A�@���]
�@�B�@�t�]
�@�C�@�u���[�L
�@�S�̋@�\�ɐ�ւ��鎖���\�ƂȂ�܂��B
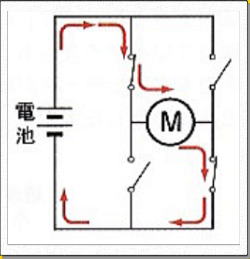
�@�u ���]��H �v
�@
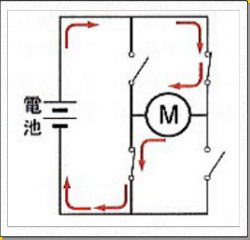
�@�u �t�]��H �v
�@
�@�u �u���[�L �v
�@
TJ3B�̎��ۂ�H�u���b�W��H�����L�Ɏ����܂��B�i ��H�}�͊g��ł��܂��B�j
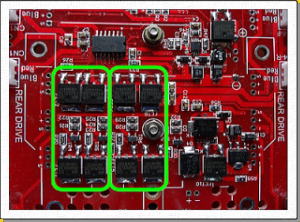
�d�q�X�C�b�`��MOSFET�ƌ����锼���̂��g���Ă��܂��BTJ3B�̎��ۂ�H�u���b�W��H�����̎ʐ^���Q�l��
�f�ڂ��܂����B�i ���ۂ̓M�����[�^�[�̉��ɂ��茩���Ă��܂���B�j
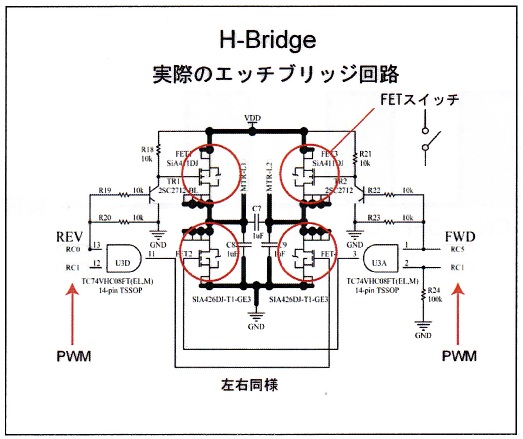
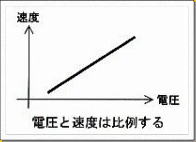
��L�̊�{��H�̂܂܂ł́A��]�����͕ς����܂�����]���x��ς��邱�Ƃ͂ł��܂���B
����ł́A���[�^�[�̉�]���x���ς�����@�͂ǂ̗l�ɂȂ��Ă���̂ł��傤���B
�m�R�n���[�^�[��]���x���d�g��
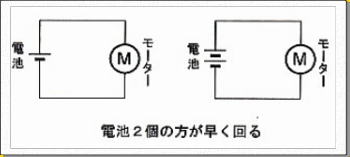
�@���[�^�[�̉�]���x��ς�����@�͂Q����܂��B
�P�̓��[�^�[�Ɉ������d�r�d����ς�����@�ł��B�i �d�r�P���A�d�r�Q�Ȃ��Ƒ��x�͂Q�{������]
���܂��B�j
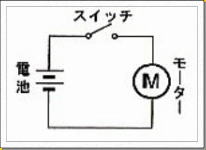
�@������́APWM�i �p���X���ϒ� �j���g�����@�ł��B���[�^�[�Ɠd�r�̊Ԃɓd�q�X�C�b�`�����āA���̃X
�C�b�`�����肷�鑬�x��ς��ĉ�]����ς��܂��B
�@TJ3B�ł́A����PWM���g���ă��[�^�[���x��ς��Ă��܂��BPWM���g�����R�̓}�C�R���Ő��䂵�₷���ׁA
�قƂ�ǂ̃��[�^�[����Ɏg���Ă��܂��B
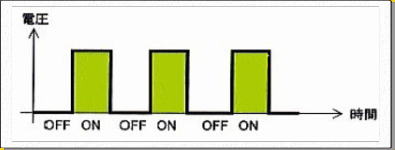
��]���x���A100%�A50%�A30% �Ƀv���O�����������̓d�������[�^�[�ɉ���鎞�ԁi�p���X���j�������܂��B
�m �펞ON�̏ꍇ �n
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���[�^�[�d���̕���

�@���[�^�[��]���x�́A�ő��]���x�ɂȂ�܂��B
�m �f���[�e�B�� 0.5 �n
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���[�^�[�d���̕��ρi50%�j
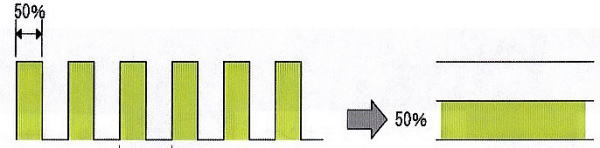
�@�A������Ɣ�r���āA50%�̉�]���x�ƂȂ�B
�m �f���[�e�B�� 0.3 �n
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���[�^�[�d���̕��ρi30%�j
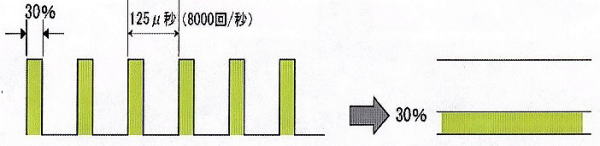
�@�A������Ɣ�r���āA30%�̉�]���x�ƂȂ�B
��L�̗ΐF�̕������X�C�b�`�������Ă���iON�j���Ԃł��B�X�C�b�`�̓����Ă��鎞�Ԃ��Z���Ȃ�ɘA��ĉ�]
���x�͒x���Ȃ��Ă��܂��B
�X�C�b�`�������Ă��鎞�ԂƐ�Ă��鎞�Ԃ̔���u�f���[�e�B��v�ƌ����܂��B
��������ƁA�P�p���X�̎����ɑ���ON���Ԃ̔䗦�Ɛ�������܂��B
�������A���̗l�ȍ����ȃX�C�b�`���O�𐧌䂷��ɂ́A�R���s���[�^�������Ƃł��܂���B
Robot�������̑��@�\�\
�o�i�[�X�y�[�X
�����͂��
�@�@�@�W���j�A���{�b�g�N���u
��619-0237
���s�{���y�S���ؒ�����W����
TEL : 070-5263-2200
FAX : 0774-98-1100
mail : jun@kinet-tv.ne.jp