未来の科学技術を子供たちに託す。 ジュニロボ <JRO>
〒619-0237 京都府相楽郡精華町光台8丁目
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
【 基本コース 】パルス変調式ラインセンサ RECRUI
入門コースで使っていたラインセンサは、赤外線光を床に向けて連続発光させていました。
この「連続発光」を「断続発光:パルス点灯」にしたものが、パルス変調式ラインセンサと呼んでいます。
今回使用するセンサのパルス変調周波数は、600 [ Hz ] < 1秒間に 600 回 点滅させています。>です。
一般のインバーター式照明装置は、数十 ~ 100 [ kHz ] の周波数で点滅させていますので、一般の照明装置の光とは受光側で判断する事ができます。
可視光では外乱光の影響を受けやすいので赤外線を使っていましたが、この方式を使う事で赤外光を使わなくてもよくなり、センサ調整をやりやすく
する為に可視光線( 緑色 & 赤色 )のLEDを使う事としています。また、スポット径サイズも大きくして制御をやりやすくしています。
それでは、なぜ「断続光」< 以降パルス光と呼びます。>を使うのでしょうか?
以下の特徴があります。< パルスにした以外の、同センサ自体の特徴も併記しています。>
① 消費電力が小さくなる。( 断続的にしか電流が流れない )
② その為、発光LEDの発熱が小さくなる事で定格電流より多くの電流を流す事が出来てより強い光を発光させることが可能となる。
光が強いとセンサと床の距離を離す事ができるので、レスキュー競技にある減速バンプでロボットが上下しても比較的対応が取りやすい特徴がある。
③ 受光側にパルス周波数と同一の周波数した通さないフィルタ回路を入れる事で更に外乱光に強くなったことで、競技会場ごとの調整が必要なくなり、
「しきい値」の設定幅が広がり結果、誤動作の少ないロバストなロボット製作が可能となる。
④ 可視光線( 緑色 & 赤色 )LEDを使う事で、目に見える光となり調整がやりやすくなる。
赤外線は人の目には見えませんが、可視光線は人の目に見えるのでどの部分にどのくらいの強さで発光しているのかが確認できる。
⑤ 発光LEDのレンズを広角にしてスポット径を大きくすることで制御がやりやすくなる。
レーザー光の様なスポット光の場合は、制御はデジタル制御になりますが、大きなスポット径で照射するとラインをトレースする際には、センサから
の出力は、アナログ的に入力する事になりライン上のどのあたりにロボットがいるのかまで判断ができます。
したがって、プログラムの後半では、この特徴を生かした制御方法でプログラムを作ってみたいと思います。( 比例制御、PID制御 )
良い点ばかり書いてきましたが、欠点が無いわけではなく上記の回路を実現しようとすれば電子回路部分が複雑となり部品点数が多くなります。
部品点数が多くなると、価格も高くなりますし、故障の発生頻度も高くなる事が考えられます。
欠点もありますが、上記のように多くのメリットがあり、ロボットの動作を確実にし、誤動作を少なくする為に有用なセンサです。
センサ仕様に関しては、設計元の下記「ロボカップジュニア・和歌山ノードの掲示板」をご覧ください。
http://kisenkoubou.jp/ws01/ws01r.html
入門コース、基本コースでは、標準のラインセンサを1個使って勉強をしてきました。
もちろん、標準ラインセンサをパルス変調方式のラインセンサに変えてもプログラムは変更することなく使用する事ができます。
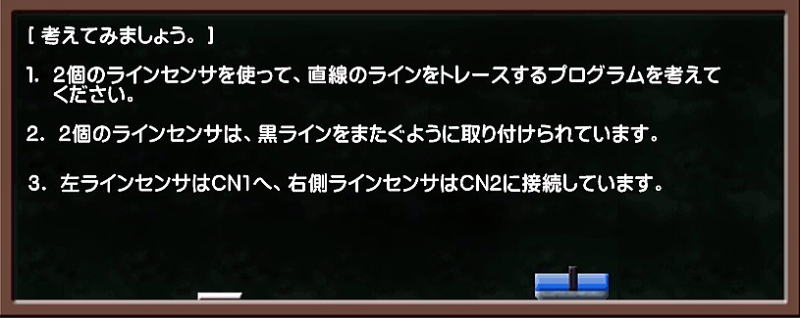
今回、基本コースのオプション内容となりますが、パルス変調式センサを2個使った場合のプログラムを考えてみましょう。
このパルス変調式センサは、パルス変調方式ということ以外にスポット系が大きいことの特徴を利用したプログラムを考えてみましょう。
センサの取付は、下図のように黒ラインをまたぐように取り付けています。
したがって、ラインセンサ1個の時にはラインのエッジを検出して動かしていましたが、今回はラインをまたいでいるので、プログラムの考え方が大き
く事なってきます。
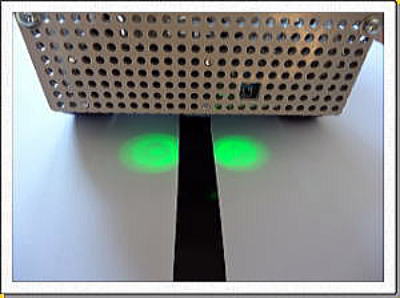
取付板にセンサ2枚(表裏で取付)取り付けた写真 ライン上のロボットの写真
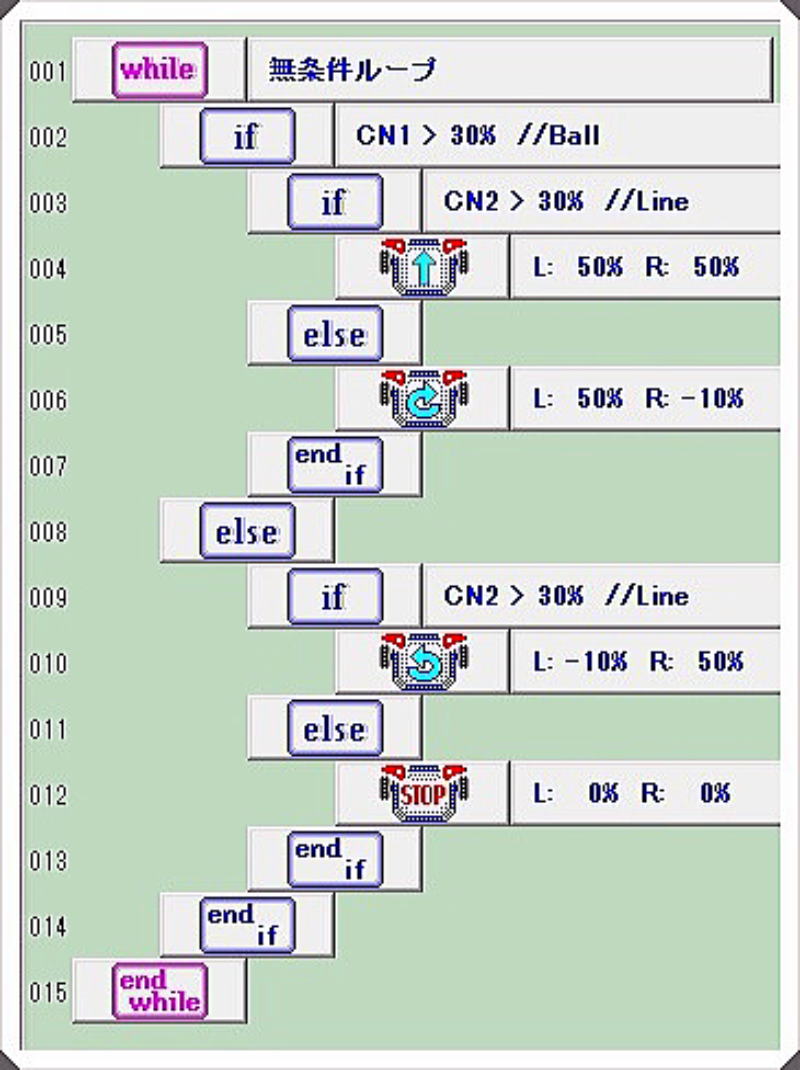
まず、考えをまとめる方法の一つに、フローチャートという方法があります。
いきなりプログラムを書いていくのも良いのですが、長いプログラムになってくると頭の中で整理が出来なくなってきます。
そこで、フローチャートという図形化した流れ図を書いていくと、考え方の矛盾点などもはっきりしてきて頭の中の流れが見えてきます。
考え方は人それぞれ異なりプログラムの正解はありませんが、一例を示しますので、それぞれ考えてみてください。またフローチャートに慣れましょう。
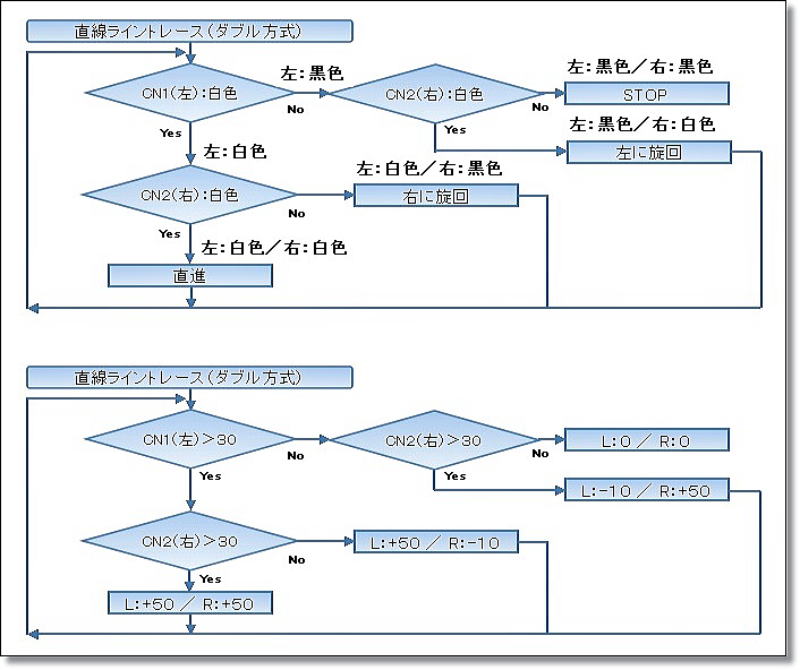
上記フローチャートで、プログラムを作ってみましょう。