未来の科学技術を子供たちに託す。 ジュニロボ <JRO>
〒619-0237 京都府相楽郡精華町光台8丁目
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
初めに!! RECRUI
最近(2014年11月現在)ダイセン電子工業より低価格のオムニホイールが発売されたので、試験的にこれを使った車体を作ってみます。
これは、釣りの浮き用部品を利用した「プラスチックオムニホイール」で、通常1万円/個、前後する部品が、1300円/個で発売されました。
特徴を生かす為に4輪駆動車にしてみました。
オムニホイール説明書 RECRUI
拡大できます。
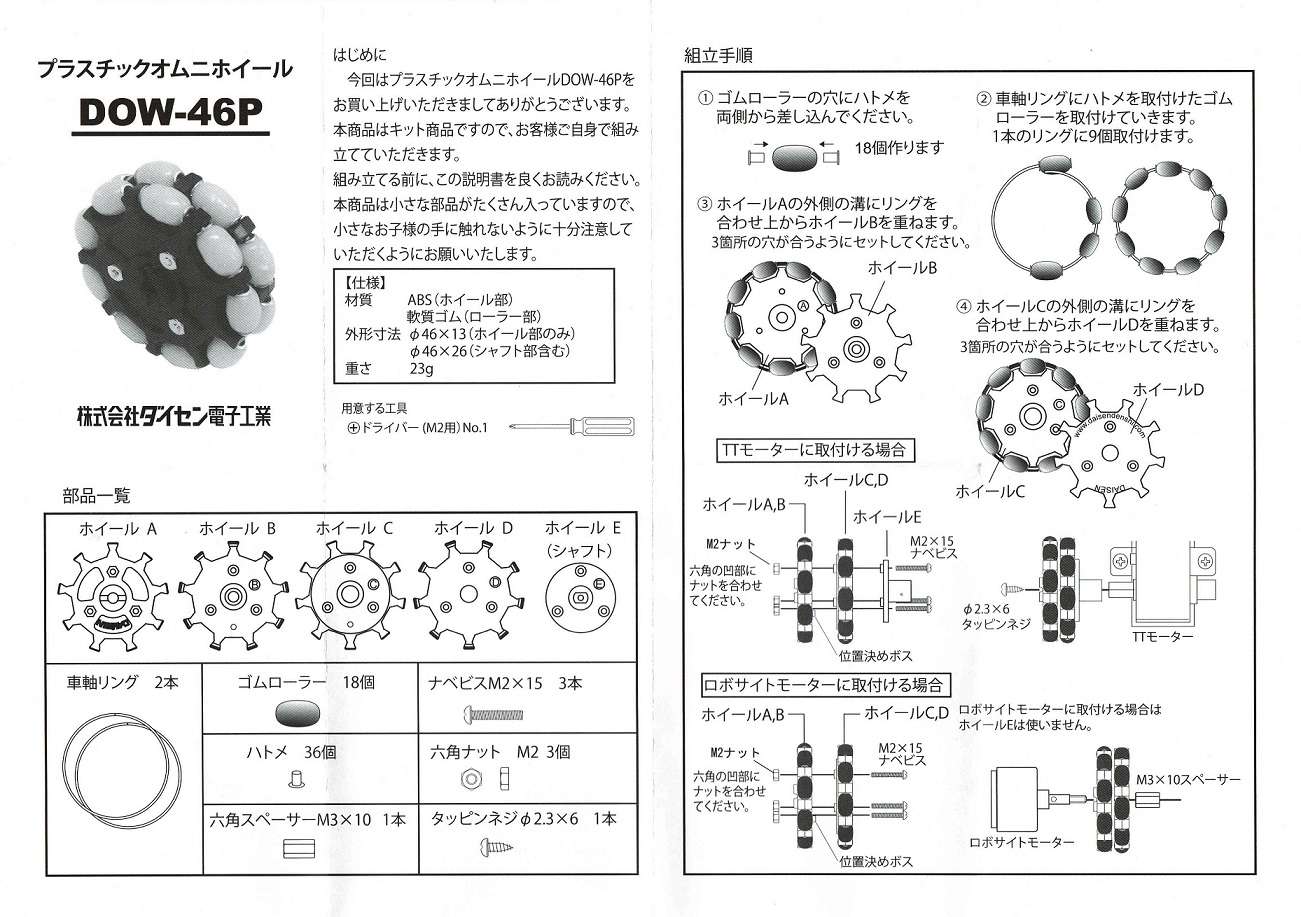
上記の様に、このオムニホイールは組立式になっていますが、数分で組立が完了します。

部品一覧と比較しながら、確認します。

ゴムローラー両側にはハトメを挟み込み、上記のリングを2式作ります。
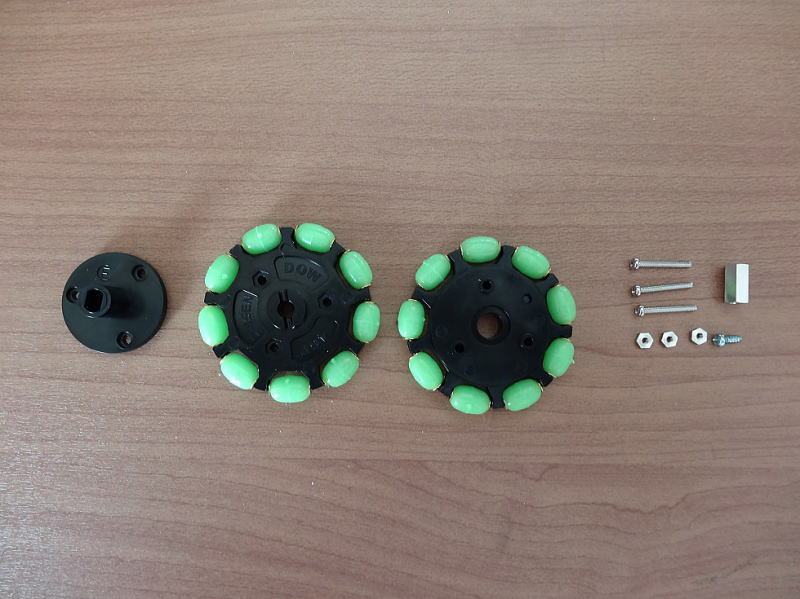
ホイールA,B ホイールC,D を組み合わせて上記の2枚を作ります。

このホイールは、左側のTTモーター(TJ3Bに標準についているモーター)と、右側のロボサイトモーター両用に使用できます。
TTモーターには、中央にあるホイールEを使ってモーターシャフトに差し込みタッピングビスで締めこみます。
ロボサイトモーターは、ホイールEは使わず、そのままシャフトに差し込み六角スペーサーで締めこみます。
ロボサイトモーターは、下記の様なギヤ比 100:1 を使います。


Power の分離 RECRUI
ロジック回路用電源(5V)と モーター駆動用電源を分離して安定した電源供給を行う改造を行います。
改造方法は、別のページで紹介している内容です。<ジャンプ>
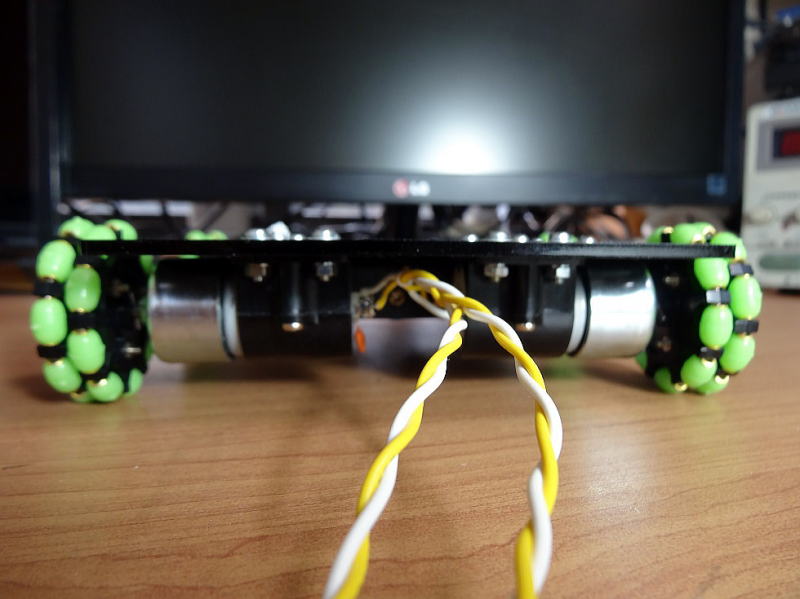
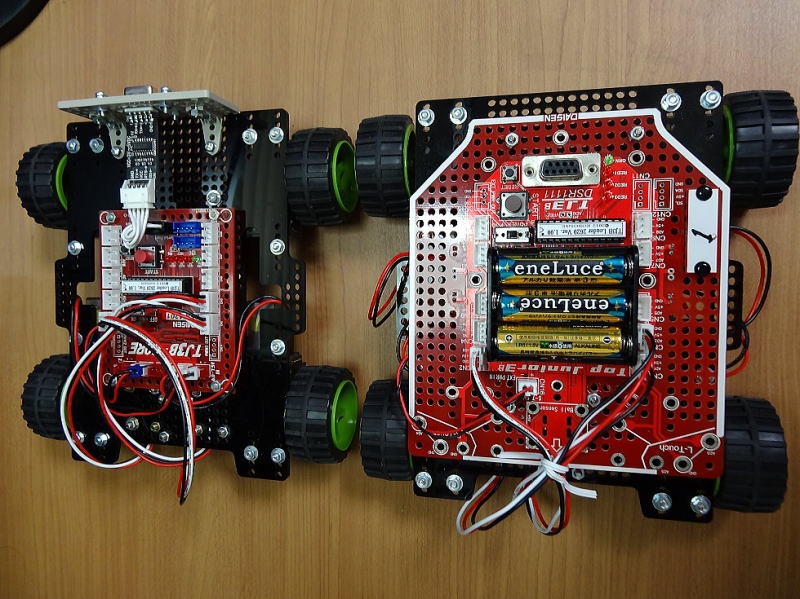
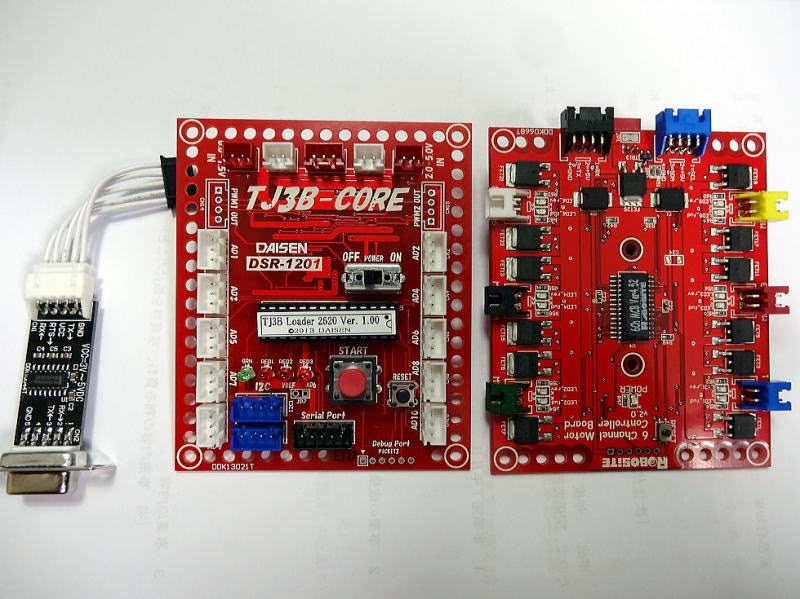
下記の写真は、標準のTJ3Bを4輪駆動車体に乗せたものと、TJ3B-COREを4輪駆動車体に乗せたものです。
ここで使用している4輪駆動車体は、通常のタイヤを4本使っているので急旋回時には非常にパワーを要します。
モーターにパワーを食われて、ロジック回路の電圧が下がる事が有ったり、しきい値が変化して安定した走行が出来ません。
そこで今回は、タイヤをオムニホイールに変え旋回時の摩擦抵抗を少なくするのと、ロジック回路とパワー系統の電源を分離して電源の安定供給
を試みてどの様に改善されるかを検証してみたいと思います。
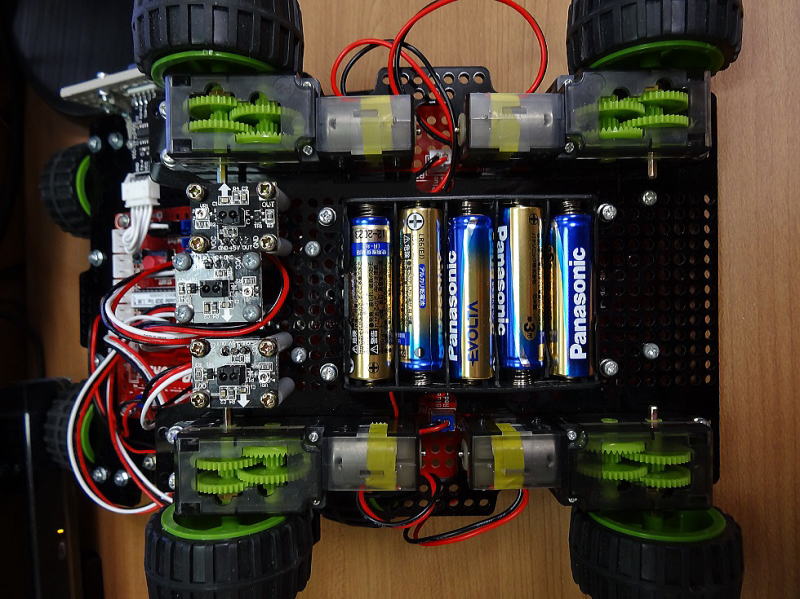
ロジック回路用としては、TJ3B標準搭載の単三電池3本(4.5V)を使用します。
パワー系統としては、単三電池5本(7.5V)を使用します。
** 上記電圧は、一次電池を使用した電圧です。 ** 場合により二次電池を使用する可能性があります。<1.2V/本>
TJ3B から電池ホルダーを外します。TJ3B の裏面の写真黄色い部分からパワー供給しているので、ここの半田を取り除きます。
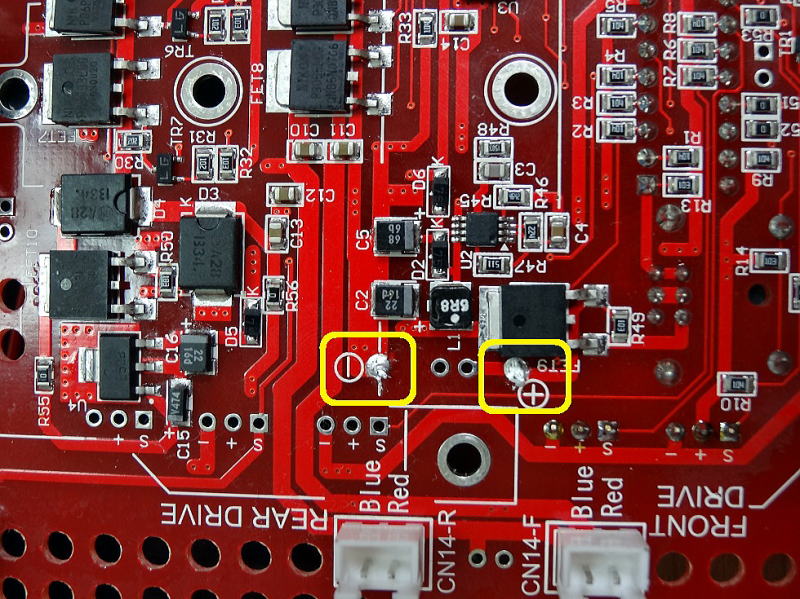
電池ホルダーを取り外した状態のTJ3Bです。黄色い部分からパワー供給しています。

取り外した電池ホルダーです。黄色い部分が出力端子です。<ロジック回路用として使用予定>


シャーシへの取り付け RECRUI
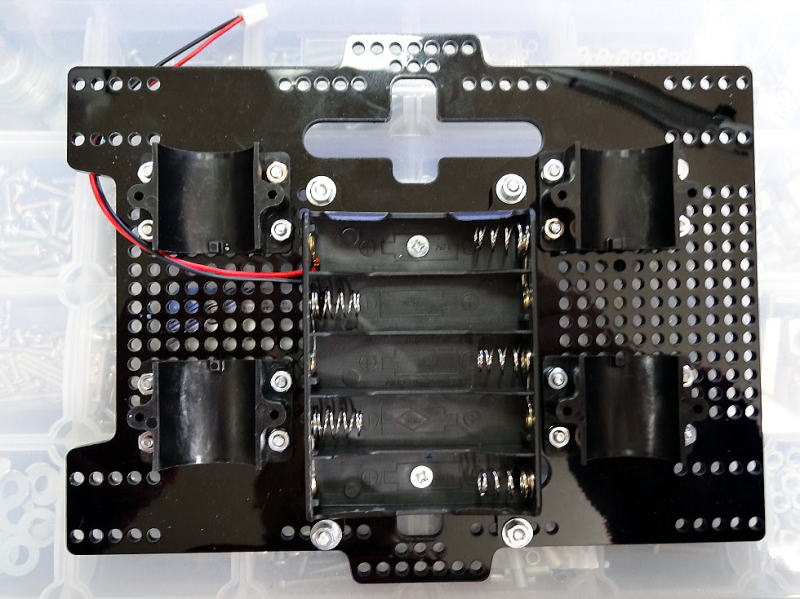
シャーシ裏側にパワー系電池BOXの取り付けとモーター4個の保持冶具を取り付けました。
この部分は、振動が伴いナットが緩む可能性があるので、スプリングワッシャを忘れない様にビスにはめ込みます。
表面への基板取り付け加工が必要なので、まだモーターは取りつけません。
CPUボードは、TJ3B−COREを使用します。
モータードライバーは、オムニの特徴を出す為に4輪独立駆動が可能な「6-ch FET H-Bridge モーターコントロールボード」を使用します。
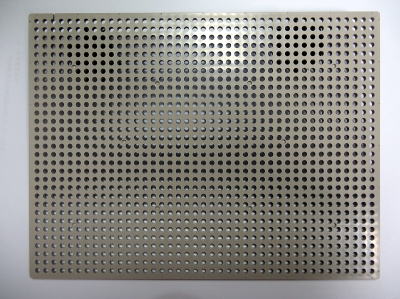
モーターベースの上に乗せるサブシャーシです。< タミヤ製 Lサイズ ユニバーサルプレートを 1枚 そのまま使用 >

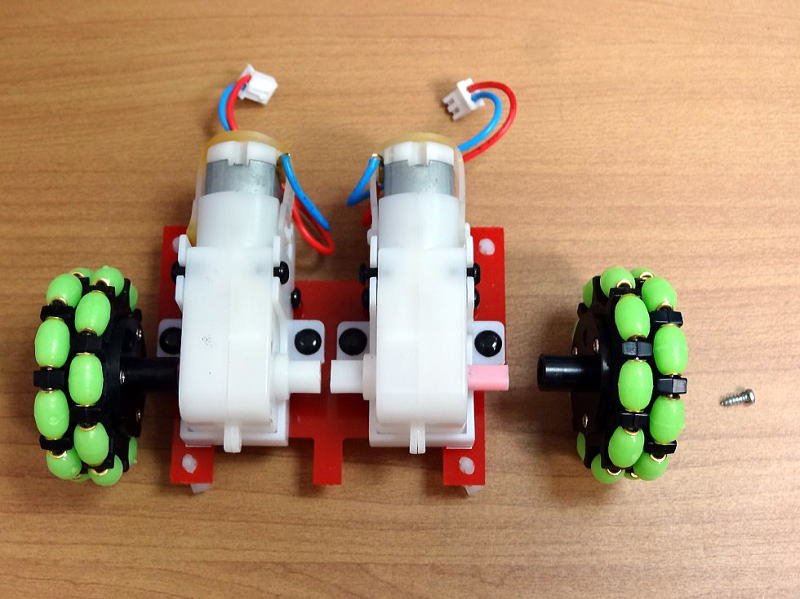
モーターの配線4個分、ノイズキラー用コンデンサーは 0.01 μF を付けています。

配線が終わったモーターをシャーシに取り付け
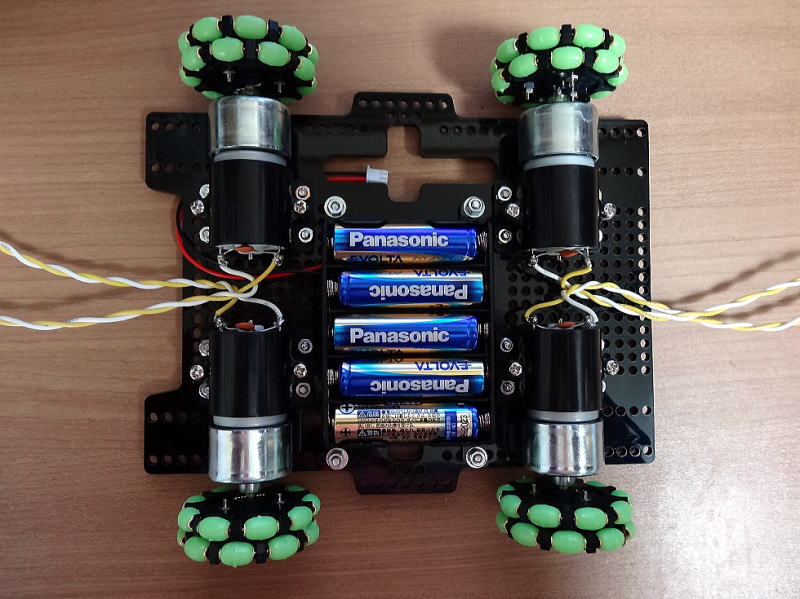
各モーターに固定電源からパワー供給して動作確認をしたところ、写真では右側の車輪が空回り、後ろの車輪は左側の車輪が空回りしてシャーシを
駆動出来ない事が判明しました。
原因は、ハッキリしていてシャーシが2mm厚つの樹脂なので歪んでいる事とモーター保持冶具の樹脂成型精度の悪さからです。
これは、以前から通常タイヤの時も起こっていた現象で放置するとプログラム通りに車体をコントロールできない事がわかっているので、ここでは
手を抜かないで、各タイヤ間の高さ調整を行います。(全体重量だけでは解決しません。)