未来の科学技術を子供たちに託す。 ジュニロボ <JRO>
〒619-0237 京都府相楽郡精華町光台8丁目
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
TJ3B の電源供給・実験 RECRUI
TJ3B 標準ロボットに各種センサ等を追加する中で、特にパワーを必要とするモーター系を駆動する為に標準で準備されている「単三電池」3個
だけではパワー不足で、外部パワーを供給する事となり TJ3B に設けられている「EXT PWE IN」へ、6【V】〜7.5【V】の外部電源を加える事となる。
この時に皆さんが経験する、モーターに負荷が加わった等で、外部で電力を消費すると、肝心の電子回路(PICマイコン含む)への電圧低下を招き
誤動作、または機能停止に至る事があります。
その為、パワー系統と電子回路系統を分離する事をお勧めします。
その方法を皆さんと作業して行きましょう。電子部品は、大変が表面実装部品の為、少し作業は細かくなりますので注意して作業しましょう。
実験室 RECRUI
TJ3B のパワー回路図です。
TJ3B には、単三乾電池3個(4.5V)を、「5【V】」にアップするアップコンバーター回路と、外部パワー(6【V】〜7.5【V】)を5【V】にダウン
させるダウンコンバーター回路と5【V】を安定化させる安定化回路があります。
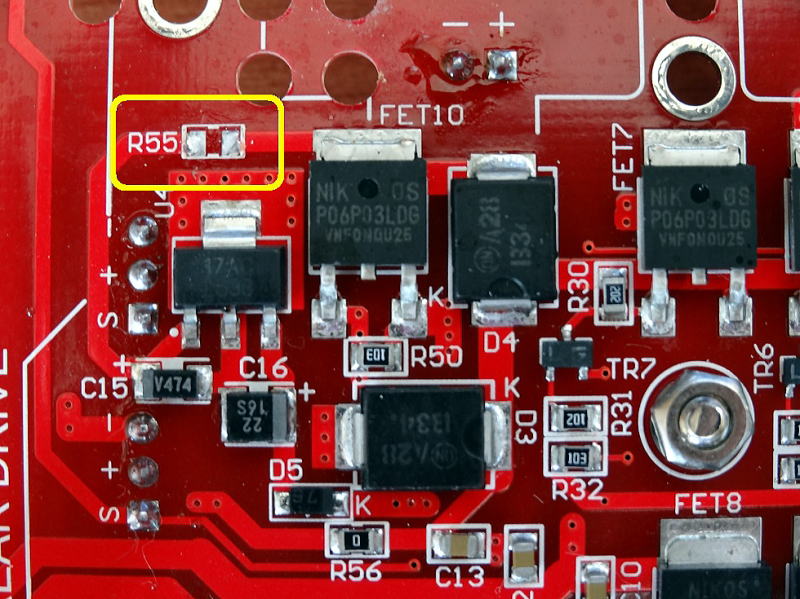
今回改造するのは、内部電源回路と外部電源回路を分ける為に下図の「R55」を外します。

実際のTJ3B の裏面の回路上の「黄枠」で囲まれた抵抗をはずします。

R55 を取り外しました。
これで、標準の電池BOXからは電子回路への電源供給が行われ、外部からは下部写真の中央上部にある「+、−」の所に2ピン・コネクタにより
供給されることになります。
これにより外部からのパワー電源の影響が、電子回路へ悪影響される事を防ぐ事ができます。
![]()
![]()
![]()