�����̉Ȋw�Z�p���q�������ɑ����B�@�W���j���{�@��JRO��
��619-0237 ���s�{���y�S���ؒ�����W����
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
���߂ɁI�IRECRUI
�@�@�@���̃R�[�i�[�́A�����ȃZ���T������pRobot�Ɏg����悤�ɂ��Ă݂���A�V�����Z���T���ȒP�ɋ���Robot�ɐڑ�
�@�@�ł���C���^�[�t�F�[�X�������Ă݂��Əꏊ�ł��B
�@�@�����̍�Ƃ��s���ׁA�Z�p�A�h�o�C�U�[���N���u���Q�Ɓ��̑哒����ɂ��肢���Đi�߂čs���܂��B
�@�@�哒�����HP�@�F�@http://okgnz.web.fc2.com/index.htm
�@�@���̒��Ɋւ�����́A�哒����ɔŌ�������܂��̂ŁA���f�]�p�͂������肢�܂��B
�@�@����A�]�ړ��̋��Ɋւ��܂��ẮA���L���[���i�哒����j�ɂċ������肢�������܂��B
�@�@Kensuke Ooyu [gee01206@nifty.ne.jp]
���j�A���C���X�L�����J���� RECRUI
�@�@�@�@�����g�����Z���T�ŊJ������ Arduino �ŁA����̃��j�A���C���X�L�����J�������J�����܂��B
�@�@�@AVR �ւ́uBoot Loader�v�������݁AArduino �ł̊J�����@�́A�O�y�[�W�̒����g�����Z���T�̃y�[�W���Q�l�ɂ��Ă��������B
�@�@�@���C���X�L�����J�����̎����ł��B

�@�@�y Ardino �X�P�b�`�d�l �z
�@�@�� �T���d�l
�@�@�@�@loop ���ɁA���̂Q�̏����u���b�N�����Ă��܂��B
�@�@�@�@�@�� ���C���X�L�����Z���T����ƌv��
�@�@�@�@�@�� �R�}���h�C���^�v���^
�@�@�@�@�^�C�}�����݂��g���AArduino �� D13 �ɐڑ����Ă���LED��_�ł����܂��B
�@�@�@�@����́AArduino �����삵�Ă��鎖�����j�^�[����ׂɎg�p���܂��B
�@�@�� ���C���X�L�����Z���T�ɂ��v��
�@�@�@�@500�������ƂɃ^�C�}�[�����݂ŃC�x���g�g���K�[�ɂ��ʒm�ŋN������܂��B
�@�@�@�@���ʂ����SRAM�ɕۑ����邽�߁A�t���O mflag ���g���܂��B
�@�@�@�@�R�}���h�C���^�v���^�Ōv�����w�肷��� mflag ���Z�b�g���A�v�����I������� mflag �����Z�b�g���Ă��܂��B
�@�@�� �R�}���h�C���^�v���^
�@�@�@�@�P�����R�}���h���V��p�ӂ��Ă��܂��B
�@�@�@�@�@�� �H�i�w���v�j
�@�@�@�@�@�@�@�R�}���h�ꗗ��\�����܂��B
�@�@�@�@�@�� M�i�v���j
�@�@�@�@�@�@�@���C���X�L�����Z���T�ɂ��v�����J�n���܂��B
�@�@�@�@�@�@�@�P�Q�W�s�N�Z���i�P���C���j���̃f�[�^���o�b�t�@�ɕۑ�����Ǝ�����~���܂��B
�@�@�@�@�@�� S�i�f�[�^�\���j
�@�@�@�@�@�@�@�v���l���P�O�i���ŕ\�����܂��B
�@�@�@�@�@�@�@�P�U�f�[�^���Ƃɉ��s���܂��B
�@�@�@�@�@�� B�i�Q�l���f�[�^�\���j
�@�@�@�@�@�@�@�v���l���Q�i���ŕ\�����܂��B
�@�@�@�@�@�@�@�R�Q�f�[�^���Ƃɉ��s���܂��B
�@�@�@�@�@�@�@�X���V�����h�i臒l�j�́A�f�[�^�̍ő�l�ƍŏ��l�̑������ς��Ă��܂��B
�@�@�@�@�@�� C�i�v���o�b�t�@�̃[���N���A�j
�@�@�@�@�@�@�@�P�Q�W�s�N�Z�����̌v���o�b�t�@���[���N���A���܂��B
�@�@�@�@�@�@�@M�R�}���h�ɂ��v���O�Ƀ[���N���A����ƁA�ǂ̃s�N�Z���ŕω������̂����m�F�ł��܂��B
�@�@�@�@�@�� T�i�X���V�����h�ݒ�j
�@�@�@�@�@�@�@�R�}���h�ɑ����āA�P���`�S���̃X���V�����h�l��ݒ�ł��܂��B
�@�@�@�@�@�@�@�X���b�V�����h�l�́A�P�O�i���Ŏw��\�ł��B
�@�@�@�@�@�@�@�f�[�^���Q�l���������Ƃ��ɁA�l�ݒ�����܂��B
�@�@�@�@�@�@�@Arduino �� A/D �R���o�[�^�́A�ő�łS�O�X�T�܂łɂȂ�̂ŁA���͈̔͂Œl�����܂��B
�@�@�@�@�@�� ���i�X���V�����h�ɂ��Q�l���f�[�^�\���j
�@�@�@�@�@�@�@�v���l���Q�i���ŕ\�����܂��B
�@�@�@�@�@�@�@�R�Q�f�[�^���Ƃɉ��s���܂��B
�@�@�@�@�@�@�@�X���b�V�����h�i臒l�j�́AT �R�}���h�Őݒ肵���l���g���܂��B
�@�@�� ���d�l
�@�@�@�@�@�� rs_putchar
�@�@�@�@�@�@�@Serial.write �̃��b�p�[���B
�@�@�@�@�@�@�@�X�P�b�`���� Serial.write ���g���ƃR�[�h�T�C�Y��������̂Ŋ��ɓ���Ă��܂��B
�@�@�@�@�@�� crlf
�@�@�@�@�@�@�@���s��p���B
�@�@�@�@�@�@�@rs_putchar �𗘗p���āA�f\r�f�A�f\n' ���A���̏��ɏo�͂��܂��B
�@�@�@�@�@�� show_help
�@�@�@�@�@�@�@�R�}���h�H�œ��������A�@�R�}���h�̈ꗗ���o�͂��܂��B
�@�@�@�@�@�� send_si
�@�@�@�@�@�@�@���C���X�L�����Z���T�� SI �M���� H�AL ��ݒ肵�܂��B
�@�@�@�@�@�� send_clk
�@�@�@�@�@�@�@���C���X�L�����Z���T�� CLK �M���� H, L ��ݒ肵�܂��B
�@�@�@�@�@�� send_led
�@�@�@�@�@�@�@Arduino �� D13 �s���ɐڑ����� LED �̓X���A������ݒ肵�܂��B
�@�@�@�@�@�� update_trigger
�@�@�@�@�@�@�@�^�C�}�[�����݃��C�u���� MsTimer2 ����Ăяo���A100ms ���Ƃ� mflag ���Z�b�g���܂��B
�@�@�@�@�@�@�@�܂��A�ϐ� xcnt �� LSB �̒l���Asend_led �ɓn���܂��B
�@�@�@�@�@�@�@LED �� �P �� �O ���ŁALED�̓X���A�����𐧌䂵�܂��B
�@�@�@�@�@�� get_sensor
�@�@�@�@�@�@�@SI�ACLK �𐧌䂵�āA���C���X�L�����Z���T��������擾���ăo�b�t�@�ɕۑ����܂��B
�@�@�@�@�@�@�@SI ���AL�|��H�|��L �Ƃ��āA���C���X�L�����Z���T�� CCD ���N�����܂��B
�@�@�@�@�@�@�@CLK�ɂ��ACCD ��������o�͂��܂��B
�@�@�@�@�@�@�@CCD ����̏��́ACLK �̂P�Q�W�N���b�N�œ��͂����̂ŁA�Ō�ɓ�����H�����Z�b�g����ׂɃ_�~�[�łЂƂ� CLK �� L->H->L
�@�@�@�@�@�@�@�Ƃ��܂��B
�@�@�@�@�@�� show_raw_values
�@�@�@�@�@�@�@�R�}���h S �œ�������
�@�@�@�@�@�@�@�P�f�[�^���P�O�i���S���ŕ\�����܂��B
�@�@�@�@�@�@�@�P�U�f�[�^��\����A���s���܂��B
�@�@�@�@�@�� show_binary
�@�@�@�@�@�@�@�R�}���h B�A���œ�������
�@�@�@�@�@�@�@�P�f�[�^���P�r�b�g�ŕ\�����܂��B
�@�@�@�@�@�@�@�R�Q�f�[�^��\����A���s���܂��B
�@�@�@�@�@�@�@�X���V�����h���R�}���h B �� ���ŕς���̂ŁA�p�����[�^�� �O ��ݒ肷��ƁA�R�}���h B �ɑΉ����܂��B
�@�@�@�@�@�@�@�R�}���h���ł́A�p�����[�^�ɂP��ݒ肵�܂��B
�@�@�@�@�@�� show_digit�S
�@�@�@�@�@�@�@�P�U�r�b�g�����Ȃ��������A�O ���� �X�X�X�X �ŕ\�����܂��B
�@�@�@�@�@�� clear_buffer
�@�@�@�@�@�@�@�R�}���h C �œ�������
�@�@�@�@�@�@�@�v���o�b�t�@���[���N���A���܂��B
�@�@�@�@�@�� get_hex
�@�@�@�@�@�@�@�P�U�i���� �P �������A�O ���� �P�T �̐��l�ɕϊ����܂��B
�@�@�@�@�@�@�@�Ή����Ă��镶���́A�f�O�f ���� �f�X�f�A�fA�f ���� �fF�f �A�fa�f ���� �f���f �̂Q�Q�����ɑΉ����܂��B
AVR �y ATmega 168 �z�� Bootloader �������� RECRUI
�@�@�@�����g�����Z���T�̏��ł������Ă��܂����A�V����AVR�}�C�R���`�b�v�ɂ́uBootLoader�v���܂��������ނ��Ƃ���n�܂�܂��B
�@�@�uBootLoader�v�̏������݂���A�菇�����čs���܂��傤�B
�@�@�@�������݂ɂ́AAVR���C�^�[�i����j���g���J���{�[�h��ōs���܂��B���J�������i��
�@�@�@�J���{�[�h�ւ̓d�������́AAVR���C�^�[���狟������܂��B�@AVR���C�^�[�ւ̓d��������PC�����USB�p���[���g���Ă��܂��B
�@�@�@�ʐ^�E���̑��u�́A����̊J���ɂ͊W���Ă��܂���B
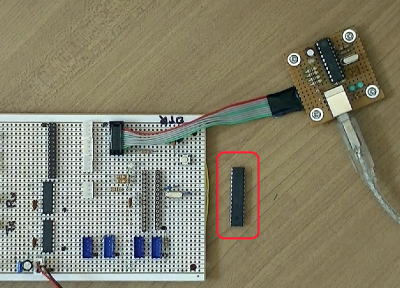
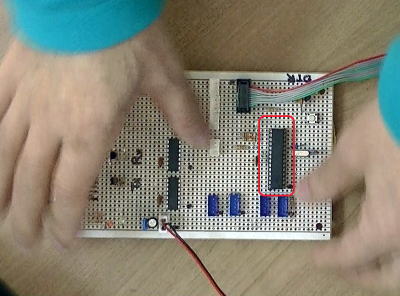
�@�@�@�܂��A�V����AVR���J���{�[�h�ɑ}�����܂��B
�@�@�uBootLoader�v�̖���
�@�@�@�@ AVR�����̃t���b�V��ROM�ɁuBootLoader�v����������Œu���ƁAAVR�ɓd���������n�߂�ƁA�܂��uBootLoader�v���N�����܂��B
�@�@�@�A �uBootLoader�v�́A��P�O�b���x�قǓ��삵�A�O���̃t���b�V��ROM���珑�����ރf�[�^��҂��܂��B
�@�@�@�B ��P�O�b�قnjo���Ă��V���ȏ������݂�������A���̂܂�AVR�����ɂ���v���O���������s���܂��B
�@�@�@����g�p����uBootLoader�v�́A�uATmegaBOOT_168_diecimila.hex�v���������݂܂��B
�@�@�@�������݂ɂ́A�uhidspxG.exe�v���g���܂��B����� �F �A�C�R���Ə�����ʁ�

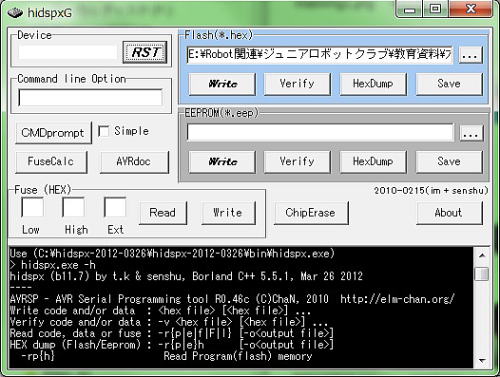
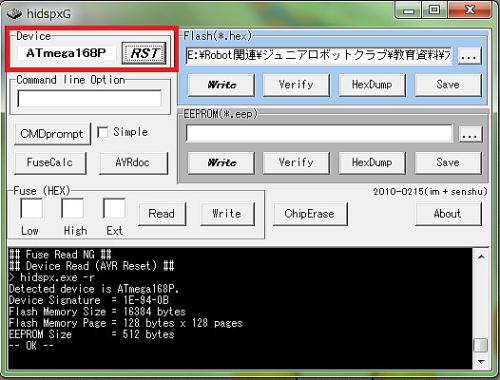
�Ԙg�́uRST�v�{�^���������ƍ����̑���AVR�}�C�R��
�̕i�Ԃ��\������܂��B
���i�ɂ́AAVR��\������Ă��܂��B�i���F�\���j
����AVR�}�C�R���ɂ́A�܂� Fuse Bits �̏������݂�
�w�肵�Ă��Ȃ��̂ŁA�G���[�ƂȂ��Ă��܂��B
���̑��A���Ƃ��ăt���b�V��ROM�T�C�Y�A�����u��
�b�N�i128Bytes��128Pages�j�ݒ�ɂȂ��Ă��邱�ƁA
EEPROM�T�C�Y�����\������Ă��܂��B
�@�@�@Fuse Bits �̏������݂����܂��B���ڍד��e�͏ȗ����Ă��܂��B��
�@�@�@����́A
�@�@�@�@�@Low �F F7
�@�@�@�@�@High �F DC
�@�@�@�@�@Ext�@�F F�W
�@�@�@���������݂܂��B
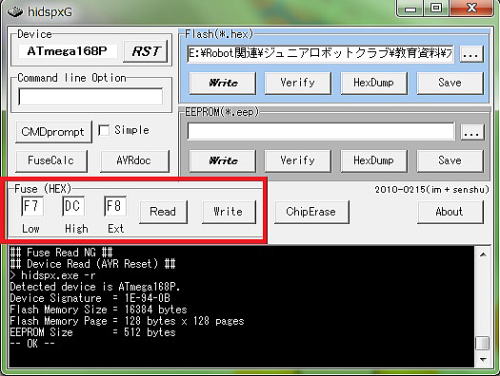
Fuse (HEX) ���̂��ꂼ��ɐ��l�ݒ肵����uWrite�v
�{�^���������ď������݂��s���܂��B
�u�͂��v���N���b�N���܂��B
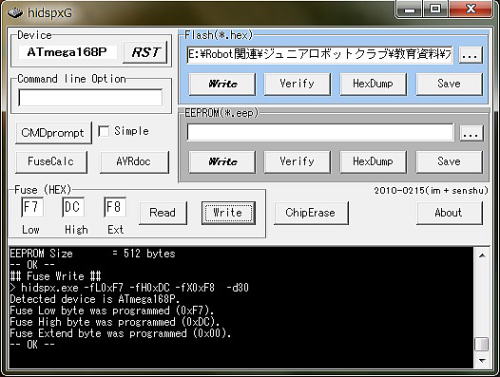
���i�̍���OUTPUT���ɁAFuse Bits ���AEEPROM��
����ɏ������݂��o������������܂��B
�@�@�@���܂ł̏o�͌��ʂ����i�ł��B
|
Use (C:\hidspx-2012-0326\hidspx-2012-0326\bin\hidspx.exe) > hidspx.exe -h hidspx (b11.7) by t.k & senshu, Borland C++ 5.5.1, Mar 26 2012 ---- AVRSP - AVR Serial Programming tool R0.46c (C)ChaN, 2010 http://elm-chan.org/ Write code and/or data : Verify code and/or data : -v Read code, data or fuse : -r{p|e|f|F|l} [-o |
�@�@�@Fuse Bits �̏������݂�����I�����܂����̂ŁA����Ɩ{��́uATmegaBOOT_168_diecimila.hex�v���������݂܂��B
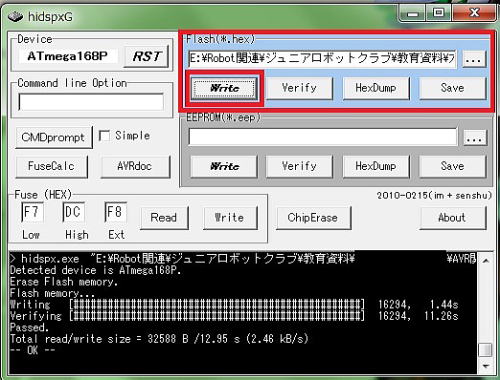
�uATmegaBOOT_168_diecimila.hex�v������t�H���_
��I�����āuWrite�v�{�^���������܂��B
OUTPUT���ɂ́A��������ł׃��t�@�C���Ă���l�q��
�\������Ă��܂��B
�@�@�@���ɁA�摜�f�[�^�[���m�F����ׂ̓���m�F�p�X�P�b�`���AAVR�}�C�R���ɏ����Ă݂܂��B
�@�@