未来の科学技術を子供たちに託す。 ジュニロボ <JRO>
〒619-0237 京都府相楽郡精華町光台8丁目
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
【 基本コース 】第七回:最終回 RECRUI
今回が、基本コースの最終回となりました。 教育用ロボット TJ3B と出会って約1年間( 11回 )の取組でした。
入門コースでは、TJ3B の標準機能を勉強し、基本コースでは、標準機能に光学距離センサ、超音波距離センサ、サーボモーターを追加して、各センサ
の原理、使い方、ロボットへの取付、それらを使ったプログラム制作を行い実際の課題コースでロボットの評価をするという進め方で勉強を行ってきま
した。
今日は、最終回なので締めくくりとして前回までの課題の解決と代表者による成果発表を行いました。また当クラブ以外でのロボットコンテスト等で
活動していた人たちから、活動内容の紹介をして頂きました。
最後に、今回勉強出来なかったが大変重要なセンサの紹介と、それを使ったデモをしてみなさんに見て頂きました。当クラブとしては、ロボカップ
ジュニア大会に参戦してもらえるまで支援していきたいと考えていますので、引き続き「中級コース」(仮称)を設けて来年5月からスタート出来る様
準備を進めていきます。
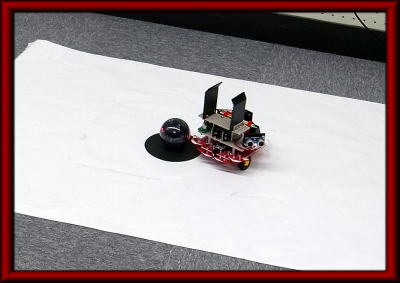

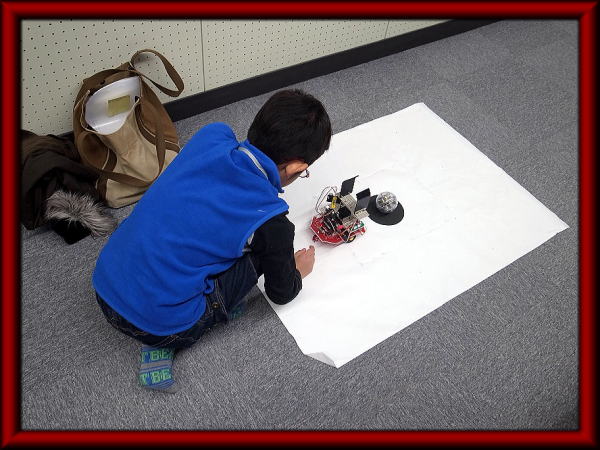
模造紙の外から赤外線ボールを検出して、ボールを模造紙外へ運ぶ サッカーコートの内周、外周を壁にあたらずに走行させます。

早めに教室に来て
教室開始前にスタッフと相談中です。

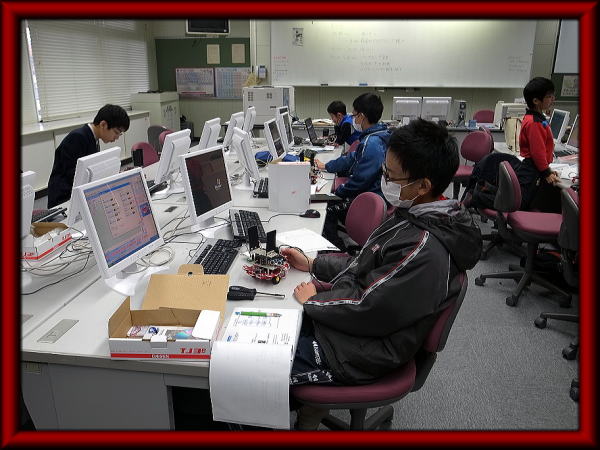
今回は、課題が前回の続きなので、
早速、課題に取り組んでいます。
課題内容は、上記で紹介済み。
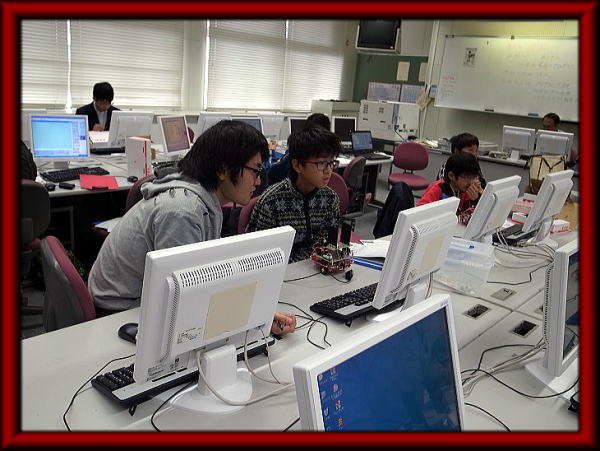
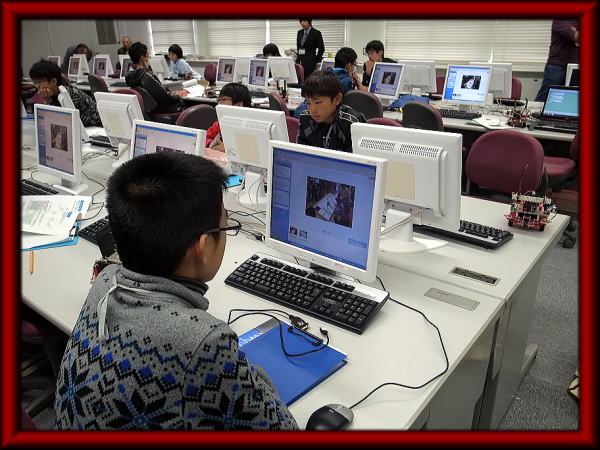
基本自分でプログラムを作成しますが、
疑問点があればスタッフの力を借ります。
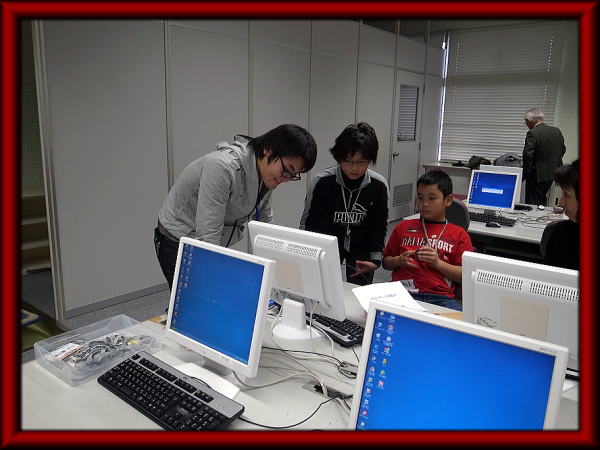
大阪電通大の学生さんが対応しています。
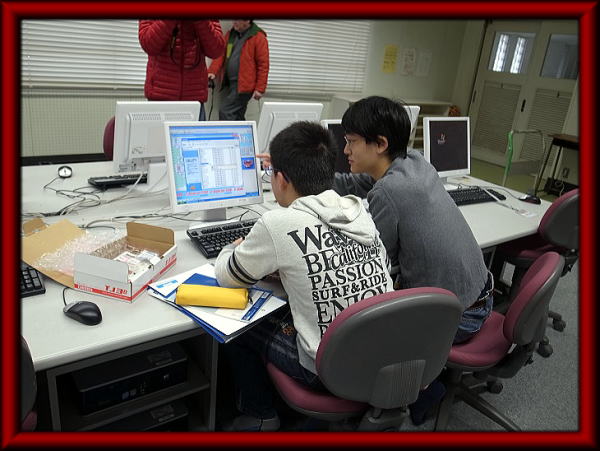
此方は、同志社大学のロボットを研究して
いる学生さんがアドバイスしています。

子供たちどうしでも相談します。
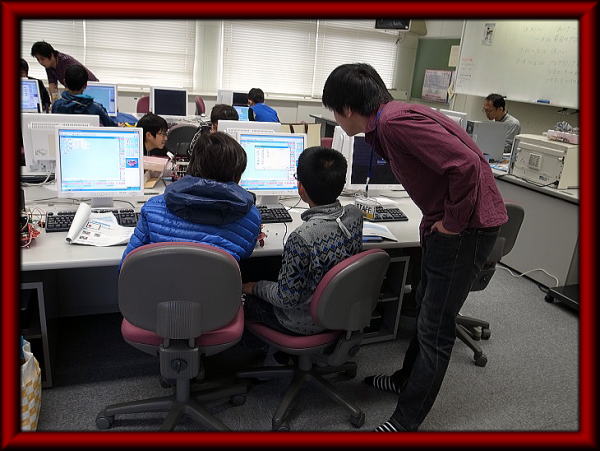
それでも解らない時は、やはりスタッフ
に相談です。

スタッフの指導も、あくまでアドバイス
の範囲です。
サーボモーター駆動で苦戦中

競技コースでうまく動かなくて、再度
相談です。
if 文の不等号ミスが多いですね。

悩んでいますね。
安易な相談でなく、自分で考えるのは
良い事ですね。

今は、スタッフは見守り中です。

サーボアームの調整中でしょうか。
女性もがんばっています。

このクラブの最年少です。
小学生4年生

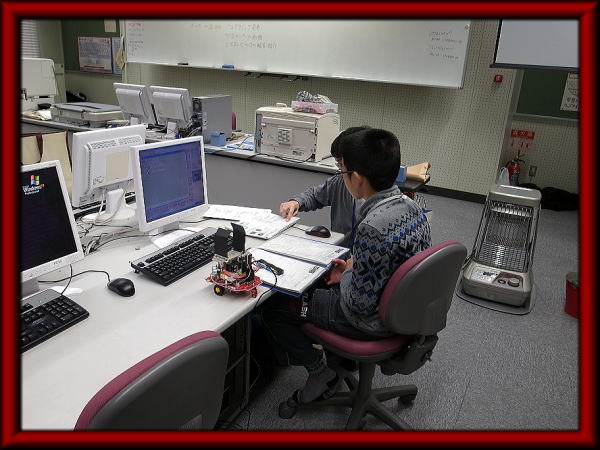
みんな資料を見ながら頑張っていますね。
フローチャートを書いている人もいます。

サーボモーターと、センサのしきい値
の調整が課題です。

ハードの機構部手直しが大変そうですね。
ボール検出位置に少し誤差が出ています。

余裕のプログラム作成で
提示課題はすべてクリアしました。

光学距離センサがうまく使えていない。
壁にすれてしまう。
センサモニターで、センサの感度を
見ています。
赤外線ボールの距離対電圧を見ています。

PC側の動作不良発生
ビルド失敗、通信不具合が発生、調査中
少し、息詰まってしまったかな?

サーボモーターの動作がおかしい?
先生から直接指導してもらっています。

PC動作不安定が解決出来ません。

此方は、赤外線ボールの検出精度アップ
の方法?
またまた悩んでいますね?
ここから成長しますよ。

光学式距離センサ部分の微調整です。
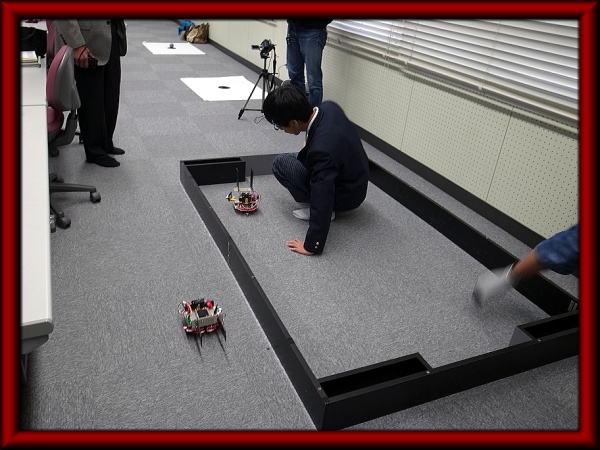
適度な距離をもって壁を安定に走行
させる調整が難しい。

赤外線ボール競技へのチャレンジ開始
距離対電圧値のチェックです。

子供たちが作成したプログラムの
模範デモ
模造紙外からボールを検出しロボットは
ボールに向かっています。

ボールをチャッキングして、反転して
模造紙外にボールを運び、終了したので
アームを上部に上げ停止しました。

2人目のデモ中
ボールに向かっている

ボールをチャックした状態です。
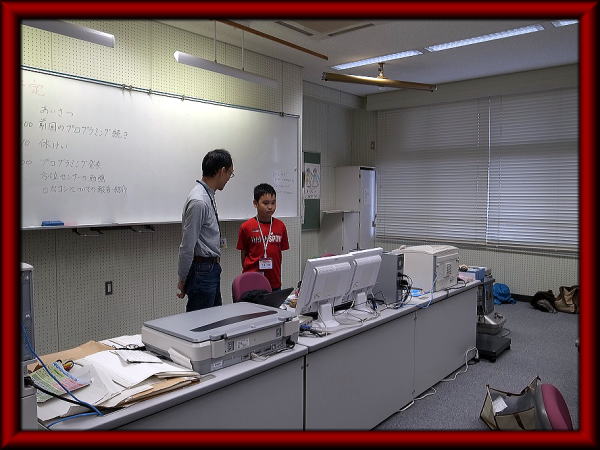
上記、デモを行ったプログラムの説明を
みんなに説明しています。
先生は、その時のロボットの状態を
示しています。

これが、プログラムの一部です。
よく出来ています。
先生から補足説明をしています。

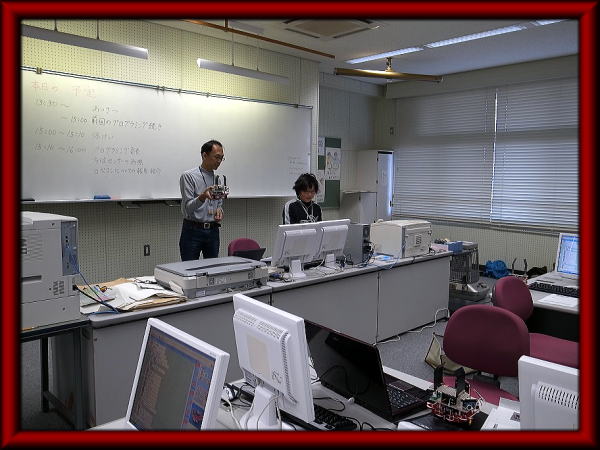
新しいセンサの説明
多機能電子コンパスを使ってロボットを
指定した方向に安定して向かせる。
このデモでは、ロボットを南に向かせてい
ます。

どこからスタートしても、南に向きます。

同センサを使ってロボットの傾き検出
登り坂にさしかかったらパワーアップ
するデモをしています。

ロボットを傾けるとLEDも点滅します。

他のロボットコンテストに参加して
きた子供たちから競技内容の説明が
ありました。
上記競技で準優勝して来週は、決勝戦が
あるようです。
がんばってね!!

準優勝した時の写真を紹介しました。
次は、このクラブに入る前に参加した
レゴマインドストームの競技内容の
説明がありました。
競技コース、ルールの説明です。

スタッフも聞き入っています。

すべてが終了しましたが
希望者は、最後までロボットの
プログラムの完成度を高めていました・

スタッフ、同僚と話し合いをしています。
なごりおしいですが、時間終了です。
出来れば中級コースでまた会いましょう。