未来の科学技術を子供たちに託す。 ジュニロボ <JRO>
〒619-0237 京都府相楽郡精華町光台8丁目
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
新型ロボット α-Xplorer の 組立 RECRUI
昨年末(2014年11月末)に、TJ3Bの後継機として発売された α-Xplorrer を紹介します。
TJ3B の 組立は、小学生では約4時間程度かかっていましたが、今回のロボットは約30分以下で完成します。(成人で15分程度)
新型ロボットの特徴は、心臓部であるマイコンが、PICマイコンから、ARMマイコンに変わったことで動作速度、機能全てにおいて改善されました。
そのために従来のTJ3Bで使っていたセンサの一部の互換性がなくなります。詳細はメーカー・ホームページにて確認ください。
【 仕 様 】
・CPU : ARM STM32F102C8T6
・電源 : 単三電池3本(標準) 追加1本可能(合計4本)
・ラインセンサ 2個(補助照明3個付き)
・ギヤードモーター 2個
・ダウンロード用USB−Bコネクタ 1個
・タイヤセット 2個
・サイズ W90xD130xH54mm
・重量 約170g(電池含まず)
・ソフト C-Style
・対応OS : Windows8.1、8、7、Vista、XP MacOSX(間もなく対応)
実際の組立写真 RECRUI
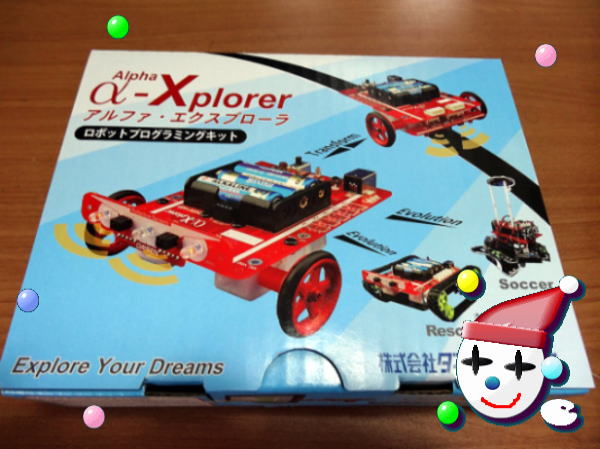
外箱サイズ
W180 X H140 X H60
箱の底に組立説明がされているが
組立が非常にシンプルなので、この
説明内容で十分である。
TJ3Bでは、3D動画配信もされて
いたが、このロボットに関しては
まったく不要である。
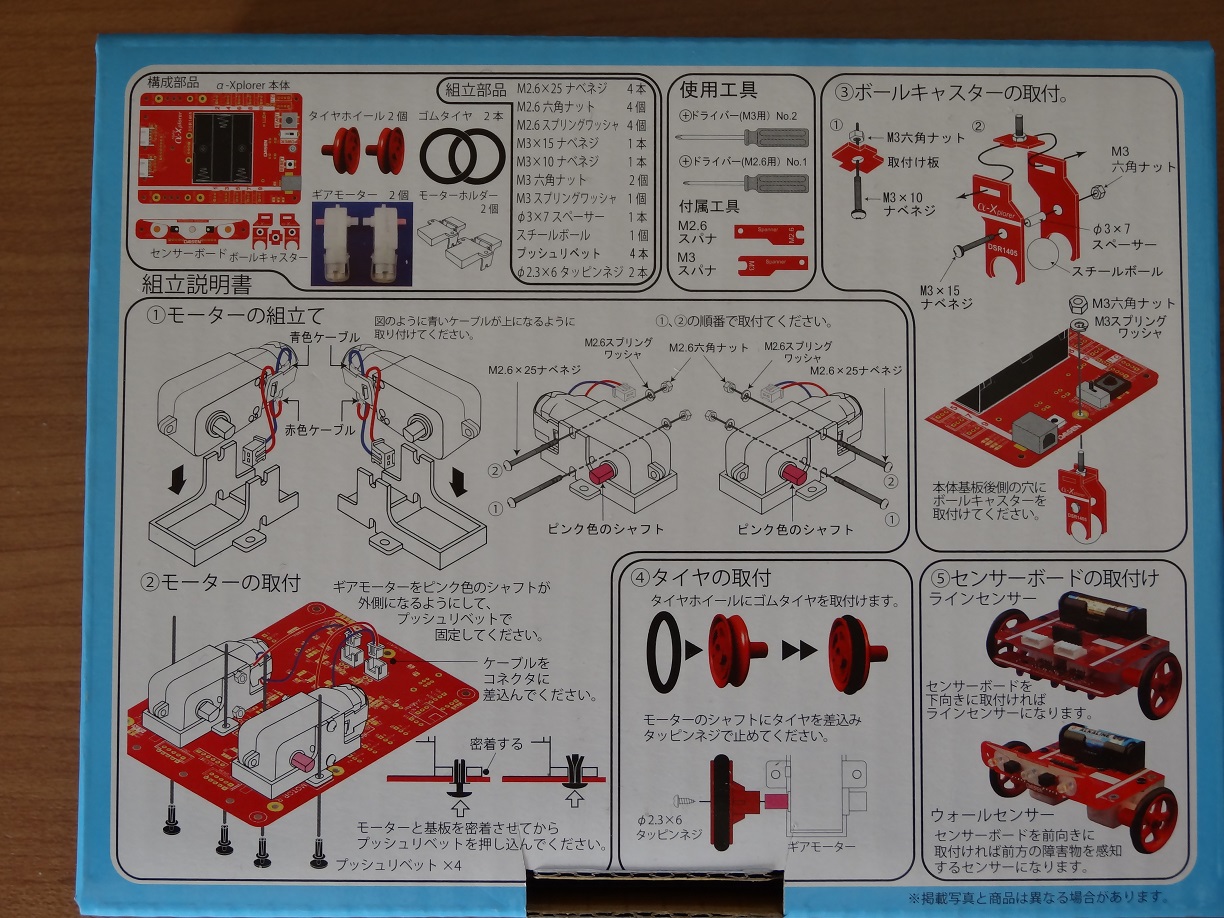
外箱の底面です。
この説明書を見ながら組み立てます。
< 左記写真を拡大できます。>
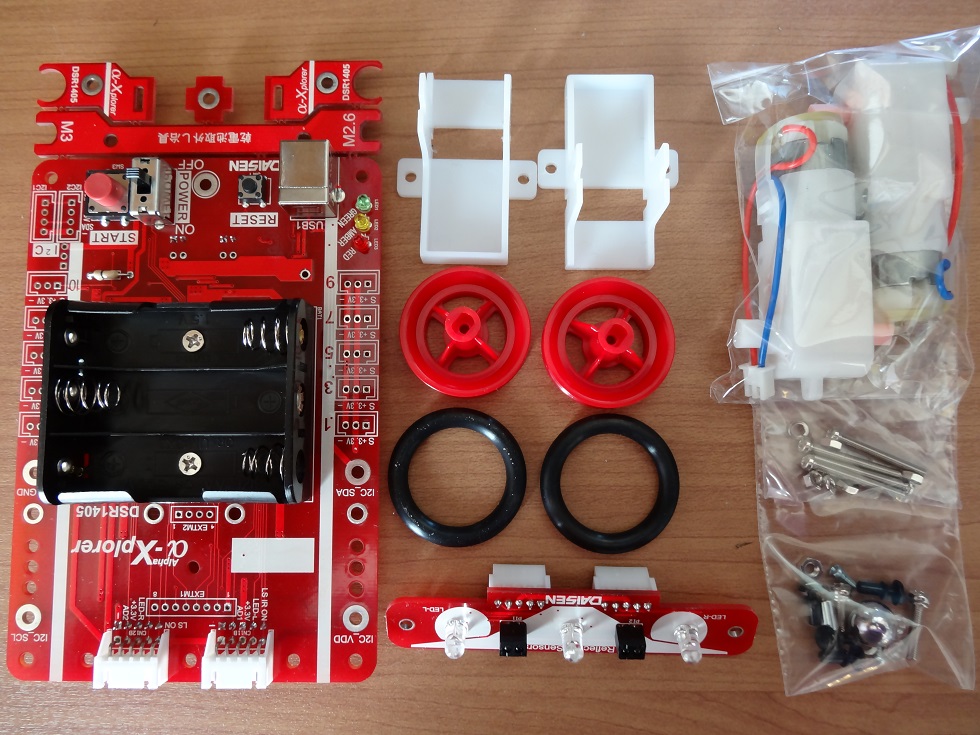
箱の中の、すべてのパーツを
取り出してみました。
< 左記写真を拡大できます。>
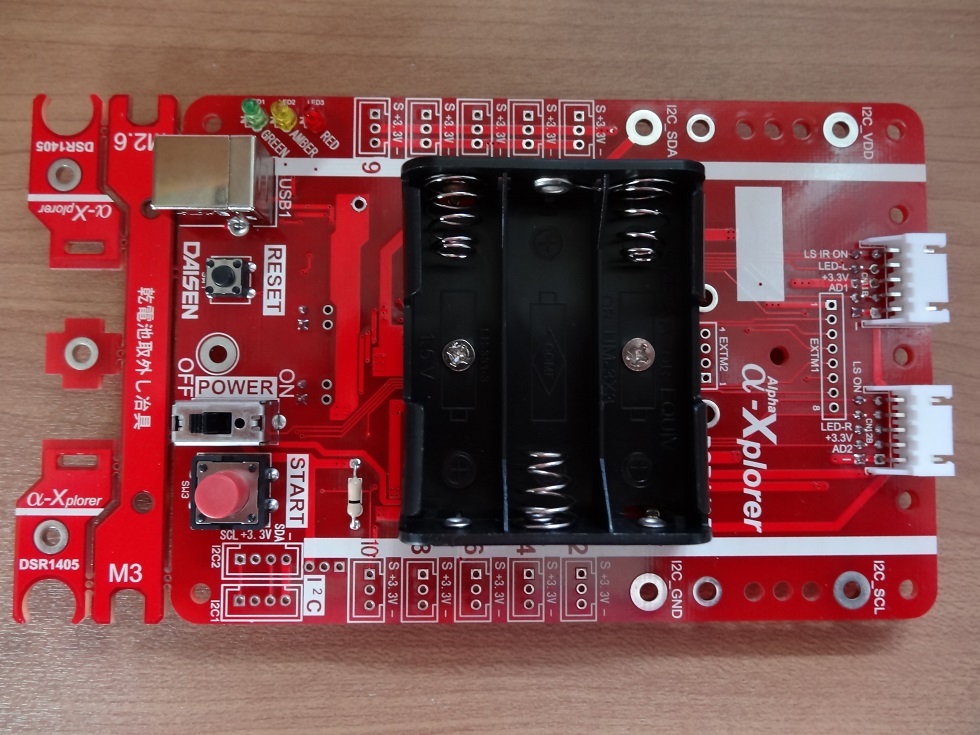
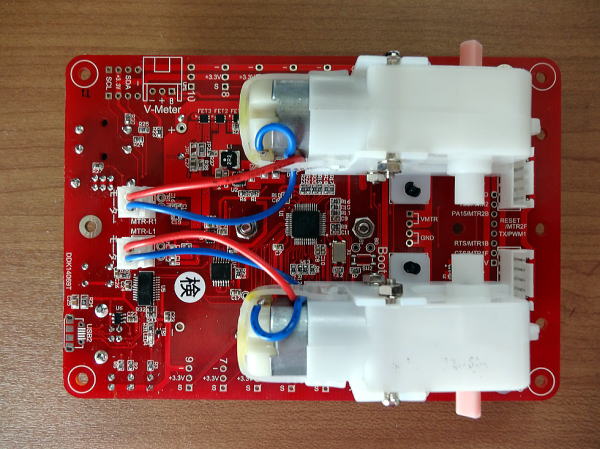
ロボット本体ベース基板(表)
< 左記写真を拡大できます。>
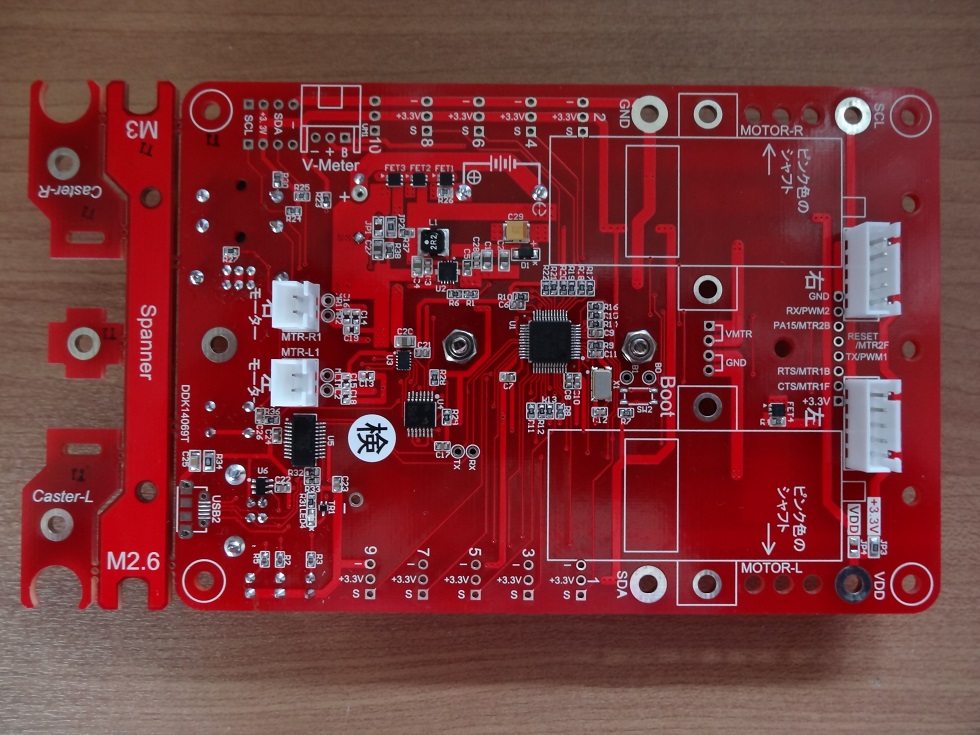
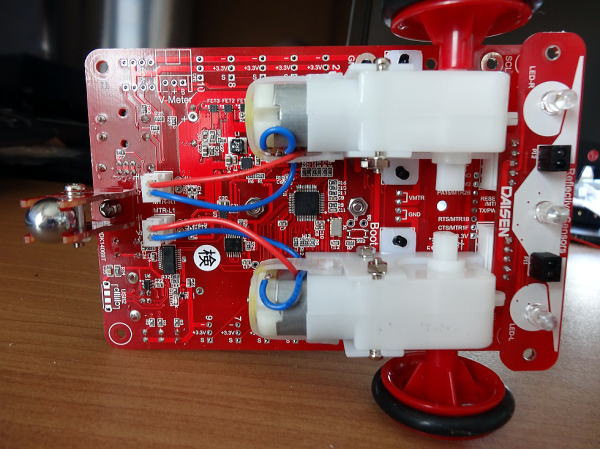
ロボット本体ベース基板(裏)
< 左記写真を拡大できます。>
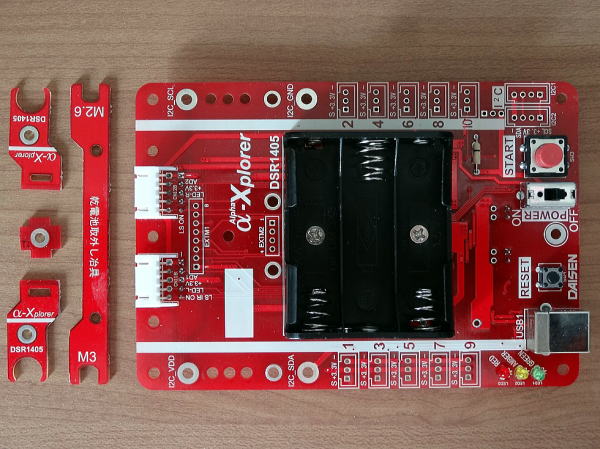
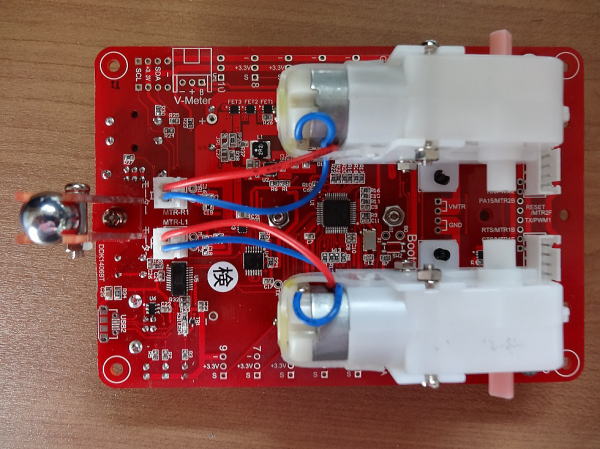
まずは、ベース基板に張り付いている
パーツを切り離します。
写真は本体基板が左右反対になりました。
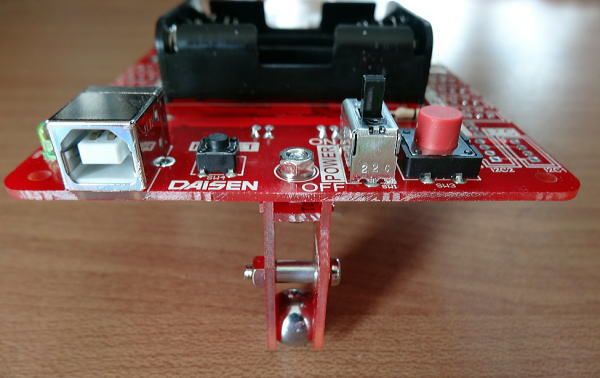
できれば繋ぎ部分をヤスリがけして
フラットにしましょう。
この時USBコネクタを傷つけない様に
気をつけましょう。
写真左側の4つのパーツです。
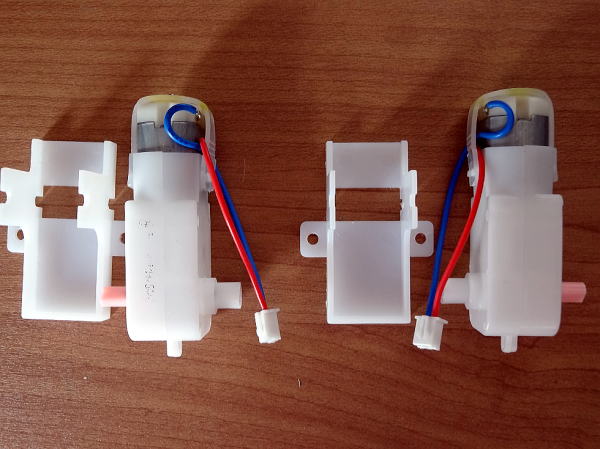
これは、TJ3Bと同じものです。
モーター部端子の上部を青線にする。
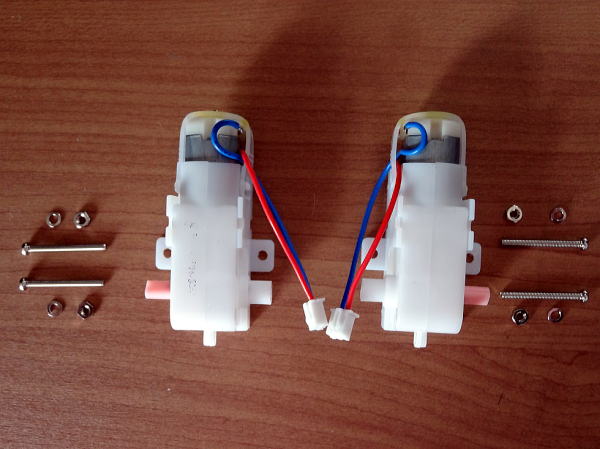
モーターとホルダーを
ネジで絞めつけます。
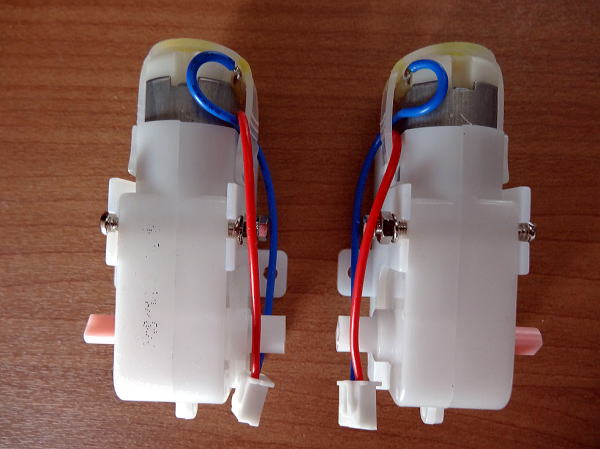
モーター部の完成写真です。
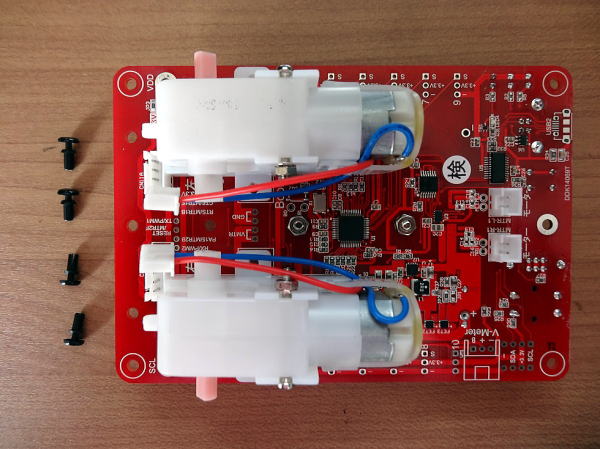
モーターをロボット本体に
取りつけます。
黒色のプッシュリベットを使用
モーター配線をコネクターへ
差し込みます。

車輪とゴムを準備

ゴムを車輪にはめ込みます。

ボールキャスターの組み立て
TJ3Bと同様です。

ボールキャスターの完成写真
これをロボットの取りつけ
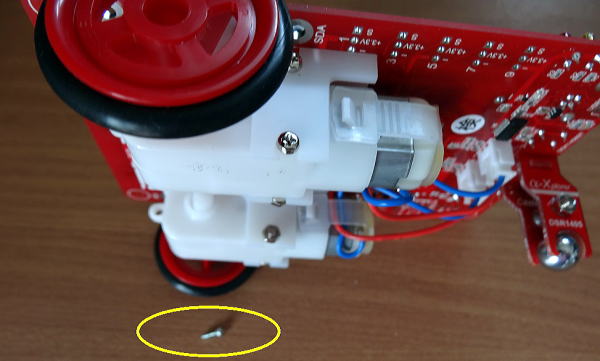
タイヤをギヤードモーターに
タッピングネジで絞め込み

絞め込んだ写真
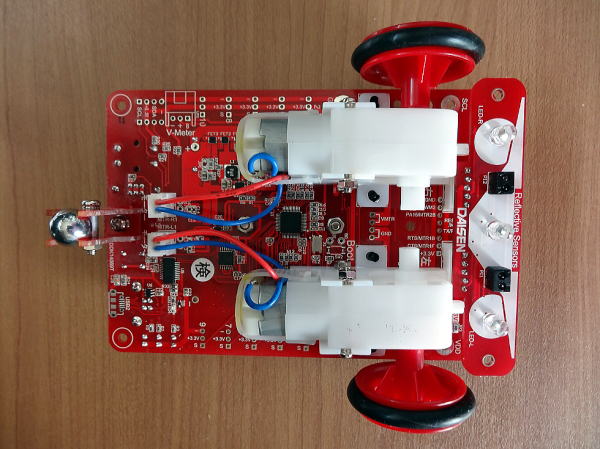
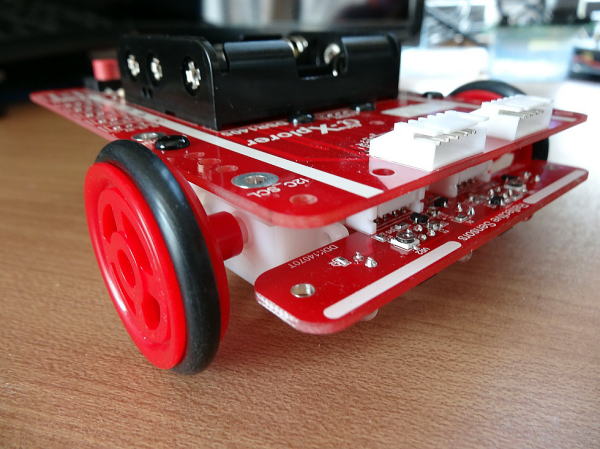
ラインセンサ基板をコネクタに
差し込んで完成

前面からの写真

取りつけ方向を変えると
サッカー仕様になります。

サッカー仕様の横写真