未来の科学技術を子供たちに託す。 ジュニロボ <JRO>
〒619-0237 京都府相楽郡精華町光台8丁目
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
C-Style 改造(1) RECRUI
今回の改造は、多機能電子コンパス<DSR-1005>を使う時に、最新Ver<20140726>では使えなくなっています。
最新Verの C-Style の変更点の1つに、変数を扱う数が多くなってる( 16個 ー> 26個 に拡大されている )優位点の恩恵を受けたい為に
C-Style が VerUp した機能をそのまま利用できて、DSR-1005 が使える様に改造してみました。
最新バージョン(本日現在:Ver140726>をインストールします。旧バージョンがインストールされている場合は削除します。
USBシリアル変換ケーブル用ドライバーは、そのままでOKです。
C-Style は、Cドライブのルートに<Daisen>ファルダがあります。同フォルダ内は下記の様になっています。(必要ファルダのみ記載しています。)
<Daisen>
<C-Style for TJ3B>
<Build>
<Build_V140726>
|ー<D_I2C.c>
|ー<D_Sio.c>
上記の2つのファイルの一部を変更します。
「D_I2C.c」のファイル中央部にある「UINT get_dir ( BYTE dno )」は、下記の様になっています。( 6軸センサ用 )
|
//------------------------------------------------------------------------------------------------------------------ #ifdef USE_DIR // dno:0(dir), 1(pitch), 2(roll) UINT get_dir(BYTE dno) { U_UINT d; BYTE adrs = DIR_ADRS; BYTE n = 0; d.W = 999; if (i2c_recv(adrs, 6) == false) return(d.W); n = 0; gU_Dat[0].H = gI2C_Buf[n++]; gU_Dat[0].L = gI2C_Buf[n++]; gU_Dat[1].H = gI2C_Buf[n++]; gU_Dat[1].L = gI2C_Buf[n++]; gU_Dat[2].H = gI2C_Buf[n++]; gU_Dat[2].L = gI2C_Buf[n++]; dno = dno < 3 ? dno : 0; d.W = gU_Dat[dno].W; return(d.W / 10); } //------------------------------------------------------------------------------------------------------------------ |
この部分を、下記の様に変更します。( 3軸センサ用:旧バージョンで使用していたもの )
|
//------------------------------------------------------------------------------------------------------------------ #ifdef USE_DIR // dno:0(dir), 1(pitch), 2(roll) UINT get_dir(BYTE dno) { U_UINT d; BYTE adrs = DIR_ADRS; BYTE n = 0; d.W = 999; gI2C_Buf[n++] = 0x20 + dno * 2; if (i2c_send(adrs, n) == false) return(d.W); if (i2c_recv(adrs, 2) == false) return(d.W); n = 0; d.H = gI2C_Buf[n++]; d.L = gI2C_Buf[n++]; if (0 < dno){ d.W += 90; } return(d.W); } //------------------------------------------------------------------------------------------------------------------ |
次に、「D_Sio.c」のファイル下段部分にある「void put_dir(void)」を変更します。変更前が下記内容となっています。
|
//------------------------------------------------------------------------------------------------------------------ #ifdef USE_DIR // "D:ddd,ppp,rrr" + CRLF void put_dir(void) { char str[5 + 1]; BYTE n; get_dir(3); tx_putc('D'); tx_putc(':'); for (n = 0; n < 3; n++){ sprintf(str, (ROMC *)"%03u", gU_Dat[n].W / 10); tx_puts(str); if (n < 2) tx_putc(','); } tx_putsX((ROMC *)"\r\n"); } #endif //------------------------------------------------------------------------------------------------------------------ |
この部分を、下記の様に変更します。( 3軸センサ用:旧バージョンで使用していたもの )
|
//------------------------------------------------------------------------------------------------------------------ #ifdef USE_DIR // "D:ddd,ppp,rrr" + CRLF void put_dir(void) { char str[3 + 1]; BYTE n; tx_putc('D'); tx_putc(':'); for (n = 0; n < 3; n++){ sprintf(str, (ROMC *)"%03u", get_dir(n)); tx_puts(str); if (n < 2) tx_putc(','); } tx_putsX((ROMC *)"\r\n"); } #endif //------------------------------------------------------------------------------------------------------------------ |
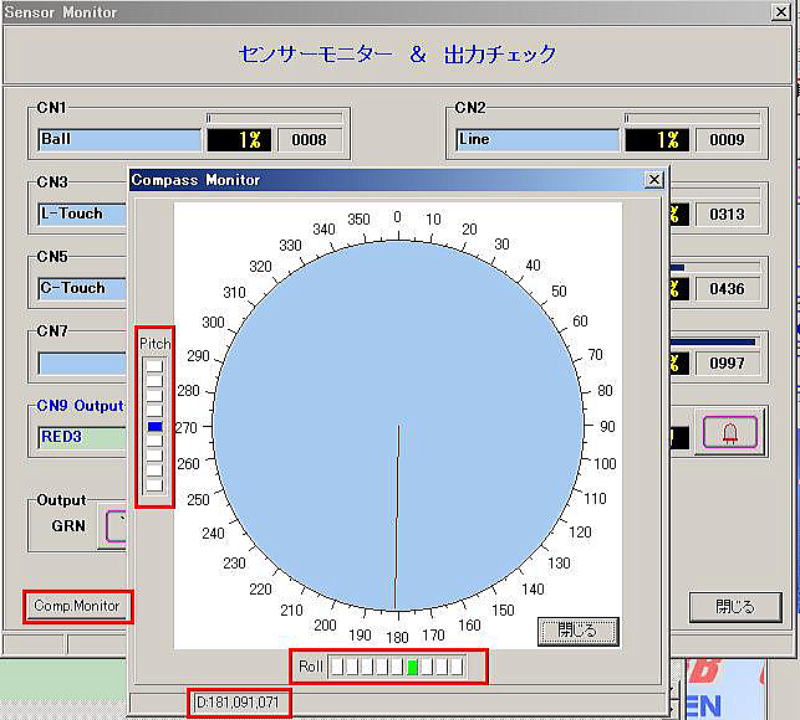
この改造により、従来のセンサーモニター上のコンパス表示は以下の様な表示でした。
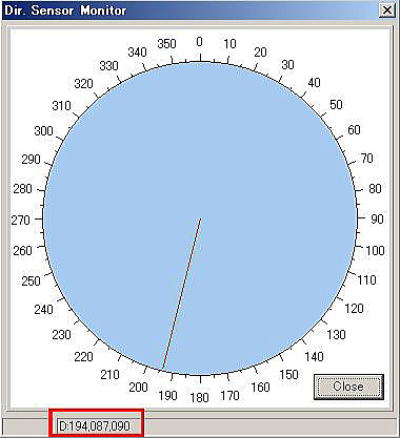
コンパス表示と、ロール、ピッチ表示は数値表示のみでした。
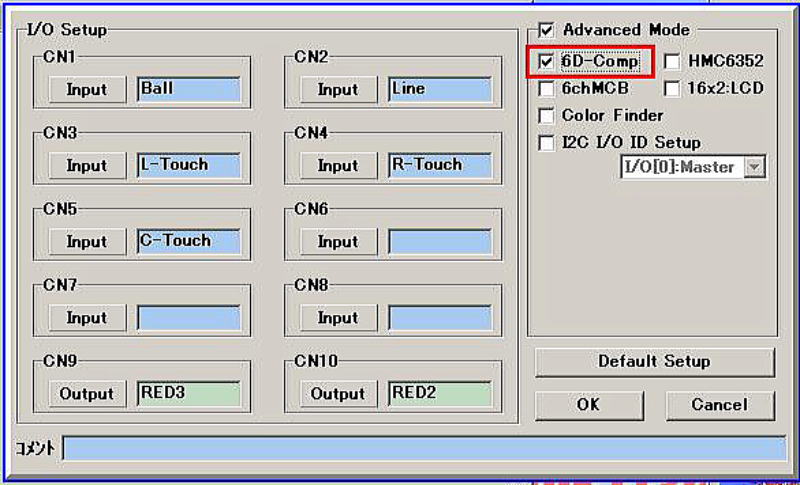
新しいバージョンでは、6D-Comp にチェックを入れてください。
新しいセンサーモニター表示です。