�����̉Ȋw�Z�p���q�������ɑ����B�@�W���j���{�@��JRO��
��619-0237 ���s�{���y�S���ؒ�����W����
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
SH�}�C�R�����g�����g���\�t�g�̕��i �㋉�җp �j�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@RECRUI
�@
�@�@�@�@���@�\�E�����\�̃��{�b�g�J�������߂�l�̂��߂ɁA���@�\�E�����\�E�����������\�ȃ}�C�R���`�b�v�̂P��� RENESAS���ESH-3 �}�C�R����
�@�@�@�g���ăv���O�����̌������Ă��炢�܂��B�@�v���O�����́A�A�Z���u���EC����ERTOS�i ��TRON �j���g���܂��B
�@�@�@���{�b�g����Ƃ͒��ڊW���܂��A���{�b�g�Ŏg�p����}�C�R�����g�����Ȃ��čs����ł́A����Ƃ��������Ă��炢�������e�ł��B
�@�@�@�J�����́ARENESAS�̕W�������J�����ł���HEW���g�p���܂����A�C���X�g�[�����́A�㔼�u�Q�l�v�ŏЉ�Ă��܂��̂ŁA�Q�l�ɂ��Ă��������B

�@���L���ނ́A�_�C�Z���d�q�H�Ƃ������Ă��܂��B
�@�f�o�b�K�́A�I���b�N�X�����e�b�N������Ă��܂��B
�@�� �g�p�@�� ��
�@�P�DCPU�֘A�@�F�@SH-2002 �V���[�Y
�@�Q�DOS�@�F�@Linux�@+�@��ITORON
�@�R�D�f�o�b�K�@�F�@PALMiCE�R�i CSIDE �j

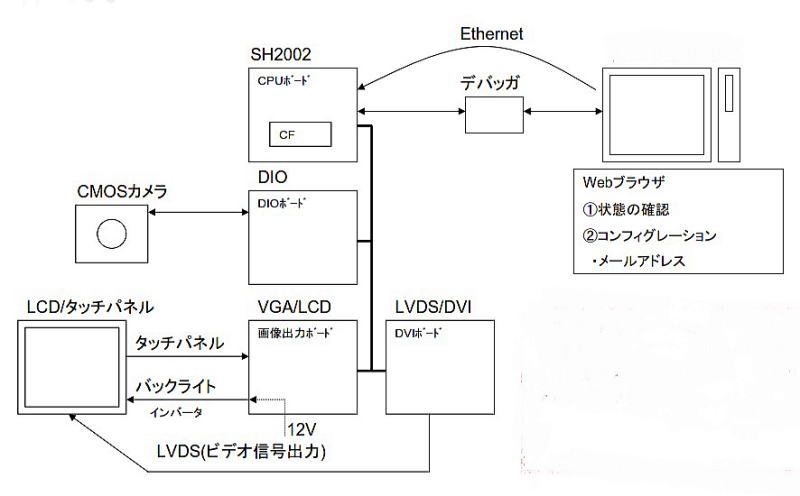
�@�P�DCPU��{���ӊ�� ���炵���ʐ^�ł��B
�@�@�@CPU�{�̊�� �F SH-2002 Rev
�@�@�@IO��@�@�@ �F EMB-DIO104-02
�@�@�@�f���o�͊��
�@�@�@VGA�^LCD�@�@: MS104-VGA/ LCD
�@�@�@LVDS�^DVI�@ �F MS104-LVDS/DVI
 �@�Q�D�g�����Ӌ@��
�@�Q�D�g�����Ӌ@���@�@�@��L�̎��ӑ��u�̊g���@�\�Ƃ��āA���L�@�ނ�lj�����
�@�@�@���܂��B�i �lj��@�\�Ƃ��ẮA���L�̒ʂ�ł��B�j
�@�@2-1�F�X�e�b�s���O�E���[�^
�@�@2-2�FDC���[�^�i�t�H�g�Z���T�t���j
�@�@2-3�F�A�i���OVR�i �d���� : �OV~�{2.5V �j
�@�@2-4�F�g�O��SW
�@�@2-5�F�VSEG�ELED�i �Q�� �j
�@�@2-6�F�r�v���W�X�^�i �S�� �j
�@�@2-7�F�u�U�[
�@�@2-8�F���Z���T�^�����́^���x�Z���T
�@�@2-9�F�k�d�c�@4��
�@
�@�@�@�@���{�b�g���ł̑g���}�C�R�����g���ꍇ�A�}�C�R���ŐF�X�Ȏ��Ӌ@��𑀍삷�鎖�������Ȃ��܂��B���̎��Ɏ��Ӌ@����g�����@��������܂��B
�@�@�@���{�b�g�ȂǂŃ}�C�R���̎��Ӌ@��i ���o�͋@�� �j�𑀍삷�鎞�́A�|�C���^���g���܂��B
�@�@�@�Ⴆ�A
�@�@�@�@�@char *p�G
�@�@�@�́A�L�����N�^�^�����ϐ��������|�C���^ p �̒�`�ł��B�܂� p �́A���ۂ̒l�̂���ꏊ�̃A�h���X���i�[�E�ێ����Ă���ϐ��ł��B
�@�@�@�����āA
�@�@�@�@�@*p
�@�@�@�́A�����ϐ��̒��g���̂��̂ł��B
�@�@�@���܉��ɁA
�@�@�@�@�@p = 1000�G
�@�@�@�Ƃ����X�e�[�g�����g���������Ƃ���ƁA���_�I�ɂ� 1000 �Ԓn���A�ϐ��̎��ۂ̏ꏊ�Ƃ����w��ɂȂ�܂��B
�@�@�@�����āA
�@�@�@�@�@*p = 10�G
�@�@�@���ϐ��ɁA���Ȃ킿 1000 �Ԓn�� 10 �Ƃ��������l�������Ȃ����Ƃ������ƂɂȂ�܂��B
�@�@�@�������A��L�� p = 1000�G�Ƃ����s�͎��ۂɃR���p�C������ƁA�u�ϐ��̃��x�����Ⴄ�v�Ƃ��� warning�i �x�� �j���ł���A�R���p�C���ɂ���ẮA
�@�@�@�G���[�����ɂȂ�܂��B�����ŁA�ǂ����Ă��|�C���^�ɐ��l�����������ꍇ�́A�^�������I�Ɂi �ꎞ�I�� �j�ϊ�����L���X�g���Z�q���g���܂��B
�@�@�@�����āA
�@�@�@�@�@p = ( char* ) 1000�G
�@�@�@�Ƃ����L�q�ɂ���A�|�C���^�ɋ����I�ɐ��l������ł��܂��B
�@�@�@����Ɠ��l�ȕ��@���g���āA���o�͂̃A�h���X����`���܂��B
�@�@�@����A�L���X�g���Z�q�ƃ|�C���^���w�肵�đ������̂͑�ςȂ̂ŁA�}�N����`�� #define ���g���Ε֗��ł��B
�@�@�@�Ⴆ�A���� A �|�[�g�̃f�B���N�V�����E���W�X�^ paddr �ɂ��āA
�@�@�@�@�@#define�@paddr�@�i *�i unsigned char * �j 0xfffd3 �j
�@�@�@�Ƃ�����ǂ��ł��傤�B����� paddr �̓L�����N�^�^�i 8 �r�b�g �j�̃|�C���^�ϐ��ŁA���̒l�i �A�h���X �j�́A16 �i�ŁAfffd3 �ƒ�`���鎖���o��
�@�@�@�܂��B�����āA
�@�@�@�@�@psddr = 10 �G
�@�@�@�Ƃ����A���ځA�l��������L�q���o����悤�ɂȂ�܂��B
�@�@�@�@�������A�����ł܂���肪�N����܂��B�@�œK���̖��ł��B�@�œK������Ȃ��l�ɂ��邽�߂ɂ́Avolatile �Ƃ������Ƃ��w�����āA���ۂɂ͈ȉ���
�@�@�@�L�q�Ƃ��܂��B
�@�@�@�@�@#define �@paddr ( *( volatile unsigned char *) 0xfffd3 )
�@
�@�@�P�DDIO �{�[�h EMB-DIO104 �̊T�v
�@�@�@�@���̃{�[�h�́ASH2002 CPU �{�[�h�̊O���o�X�i PC104 �݊� �j�ɐڑ����ACPU ���牺�L�̃��W���[�� �� I/O �𐧌䂷�邽�߂ɕK�v�Ȋe��C���^�[
�@�@�@�t�F�[�X��H���������Ă��܂��B
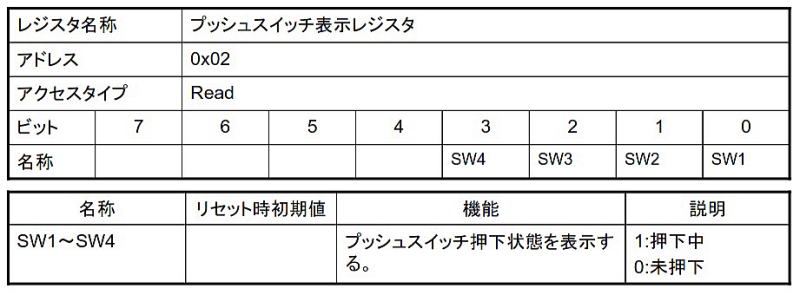
�@�@�@�@�@ �����{�^���X�C�b�`
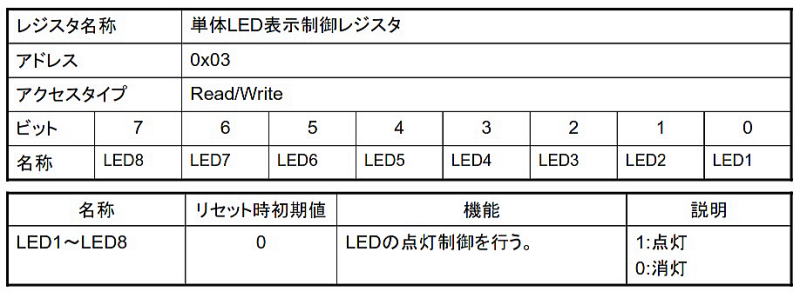
�@�@�@�@�A LED
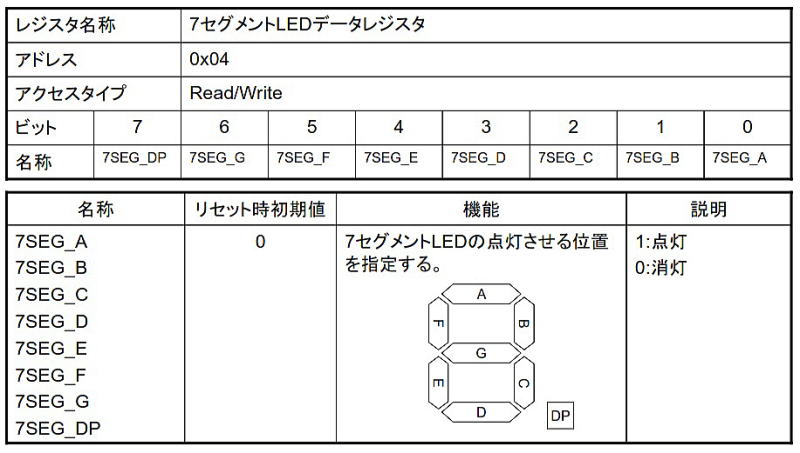
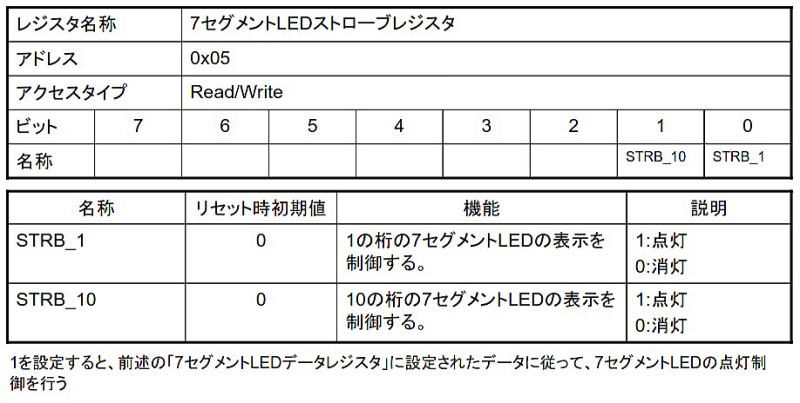
�@�@�@�@�B 7�Z�O�����gLED
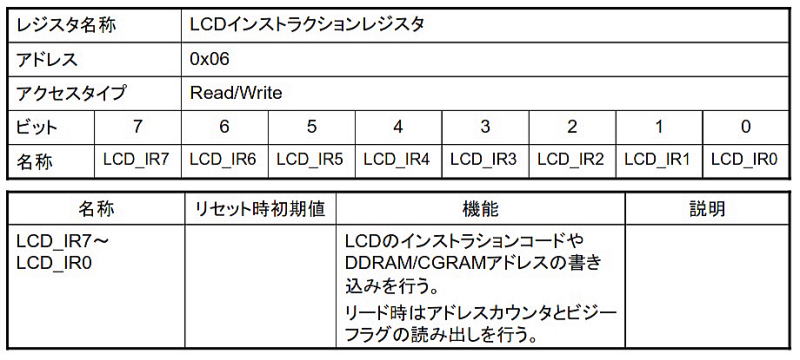
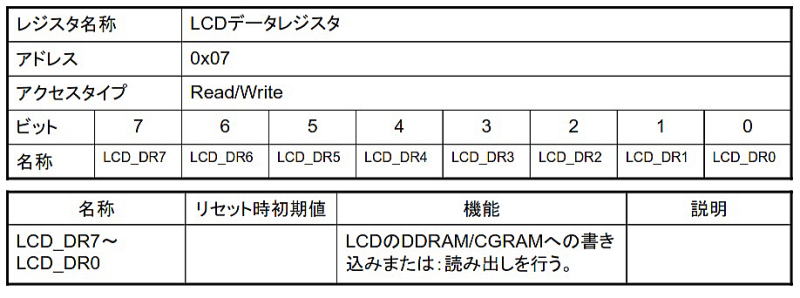
�@�@�@�@�C LCD �L�����N�^�f�B�X�v���C���W���[��
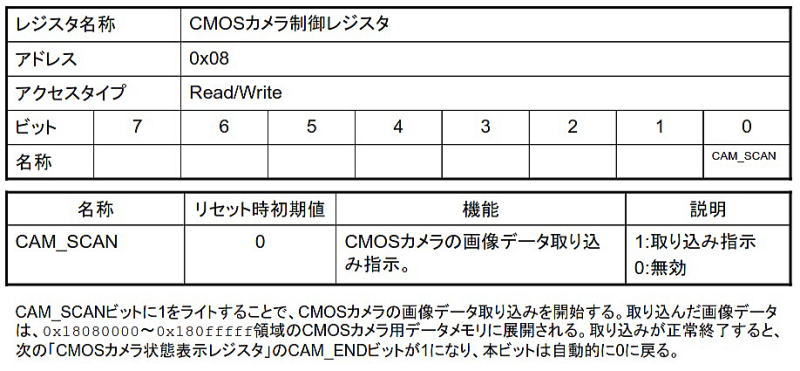
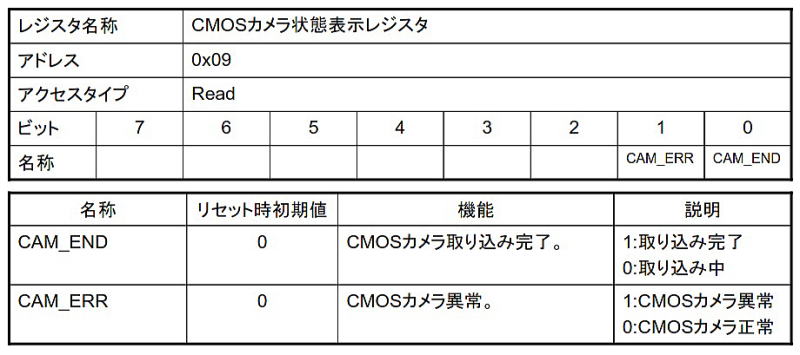
�@�@�@�@�D CMOS �J�������j�b�g
�@�@�@�@�E �g��I�^O �F AB10-EXE ��ڑ����܂��B
�@�@�Q�D���� I / O ���W�X�^�̃������}�b�v
�@�@�@�@EMB-DIO104 �{�[�h��Ɏ�������Ă��� CPLD ���� ���� I/O ���W�X�^�̃C���[�W�}�����L�̗l�ɔz�u����Ă��܂��B
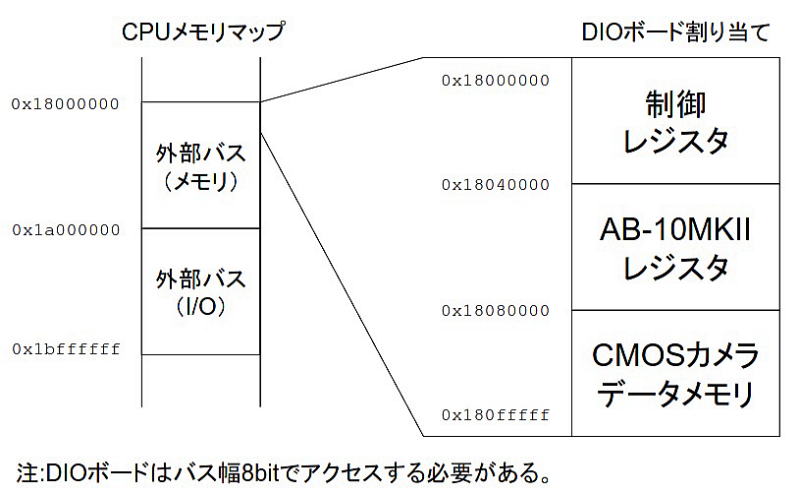
�@�@�@��L���ӏ���������l�ɁADIO �{�[�h�̓o�X�� �WBit �ŃA�N�Z�X����K�v������A�A�h���X�͉��L�̊���U��Ƃ��Ă��܂��B

�@�@�@�����ŁA�v���O����������ŁA���ӓ_������܂��B
�@�@�@�� �� �� ��
�@�@�@�@�v���O������ł����̃��W�X�^���A�N�Z�X���邽�߂ɂ́A�_���A�h���X���g���܂��B
�@�@�@�@I/O �́A�L���b�V���O�s�AMMU�̃A�h���X�ϊ��ΏۊO�̗̈�Ƃ��ăA�N�Z�X���Ȃ���Ȃ�܂���B
�@�@�@�@���������āAP2 �̈�� H'A000,000 ~ H'BFFF,FFF �ƂȂ�܂��B
�@�@�@�@���̗̈�ɂ́ACPU������ I/O ������t���Ă���܂��̂ŁA�O�� I/O �͉��L�̗l�ɂ��܂��B
�@�@�@�@��ʂRBit �́AB'101 �Ƃ��A�����A�h���X�̉��� 29 Bit �Ƒg�ݍ��킹��āAH'B800,000 ~ H'B800,000 �Ƃ��܂��B
�@�@�@�@����ł́A�ȏ�̎��ɒu���āA�v���O����������Ă����܂��傤�B�� ���y�[�W�� ��
�@�@