�����̉Ȋw�Z�p���q�������ɑ����B�@�W���j���{�@��JRO��
��619-0237 ���s�{���y�S���ؒ�����W����
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
�f�[�^�E���K�[�̏����@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@RECRUI
�@
�@�@�@�@�@�㋉�҂ɂȂ�ƃ��{�b�g�̓����͂��Ȋw�I�Ɏ��{����ׂ̃c�[�����K�v�ƂȂ��Ă��܂��B
�@�@�@�@�������x���ł́A���ɗ����Ē������Ă����p�����[�^�[�����A�듮�쎞�̑Ή����J�b�g�A���h�g���C�ł��������̂��A���l��͂���ׂɂ���Ȃ��
�@�@�@�@�d�|�����K�v�ƂȂ�܂��B���ׂ̈̃c�[���̈���f�[�^�[���K�[�ƂȂ�܂��B
�@�@�@�@�@����̃f�[�^�[���K�[�́A���X�L���[���{�b�g�̉�͂�ΏۂƂ���ׂɃf�[�^�[�̍����]���͍s��Ȃ��d�l�Ƃ��܂��B�Ƃ͂������̂̃T�b�J�[���{
�@�@�@�@�b�g�ɂ͑S���g�p�ł��Ȃ����Ƃ����A�����ł͂Ȃ��唼�̓����͂́A�\�ł���ƍl���Ă��܂��B
�@�@�@�@�i �S���삪�A�ō����œ��삵�Ă����ł͂Ȃ��̂ňꕔ�̍��������̂݉�� NG �Ƃ͂Ȃ�܂����A�O��f�[�^�[�Ő���͉\ �j
�@�Ȃ��A�����Ɋւ��Ă̓N���G�C�e�B�u�R�����YCC���C�Z���X CC BY-NC-SA2.1JP �Ɋ�Â��z�z���\�ł��B
�@�@�@�@�@�@�@�@�@�@�@ �@�@ �ڂ����́Ahttp://creativecommons.org/licenses/by-nc-sa/2.1/jp/
�@
�@�@�@�@�@Chip Select �Ёi http://chipselect.co.jp/ �j�́AWirelesePort-Z WPZ01 ��I�肵�܂����B
�@�@�@�@�I�藝�R�́A
�@�@�@�@�@�@�@ZigBee �K�i�Ή��̖����ʐM���W���[���AXBee ���g�p�����Z�b�g�i�ł��B
�@�@�@�@�@�A�@�����ʐM���W���[���� XBee ���Q�y�A�Őݒ�ς݂ŁA���G�ȏ����݂��s�v�B
�@�@�@�@�@�B�@�e��C���^�[�t�F�[�X�ɑΉ����Ă���̂ŁA����́AUSB-COM�^�C�v��I�肵�܂����B
�@�@�@�@�@�@�@���{�b�g���FRS232C�@�^�@PC���FUSB�@�i WPZ01-UC �j
�@�@�@�@���\�I�ɂ́A�W���^�C�v��PRO�^�C�v�̂Q��ނ�����܂����A�p���[�i��PRO�^�C�v��I�肵�Ă��܂��B
�@�@�@�@�����g�p�ŁA�ő�ʐM������ �U�O [ �� ]�^�P�O [ mW ] �ƂȂ��Ă��܂��̂ŁA���Z���ł͏\���Ǝv���܂��B

�@
�@�@�@�@USB �^�C�v�ɂ́AUSB-�V���A���ϊ�IC�@FT232RL�i FTDI �А� �j���g�p���Ă��܂��̂ŁAUSB �h���C�o�[�� FDTI ��HP����_�E�����[�h
�@�@�@�@���ē��肵�܂��B�i �R�QBit �łƁA�U�SBit �ł�����̂ŁA�C���X�g�[������ CPU �ɍ��킹�ăC���X�g�[�����ĉ������B�j
�@�@�@�@�@�@�@http://www.ftdichip.com/Drivers/VCP.htm
�@�@�@�@�_�E�����[�h�����t�@�C�����𓀂��āA���s�t�@�C�����N���b�N���āA�h���C�o�[�� PC �ɃC���X�g�[�����܂��B
�@�@�@�@���ɁAUSB �^�C�v�̃��W���[���� PC �� USB �[�q�ɐڑ����܂��B
�@�@�@�@PC���AUSB �����ʐM���W���[����F�����Ă��邩�m�F���܂��B
�@�@�@�@���R���g���[���p�l�������n�[�h�E�G�A�ƃT�E���h�����f�o�C�X�ƃv�����^�[�����f�o�C�X�}�l�[�W���[���Ɛi�݂܂��B
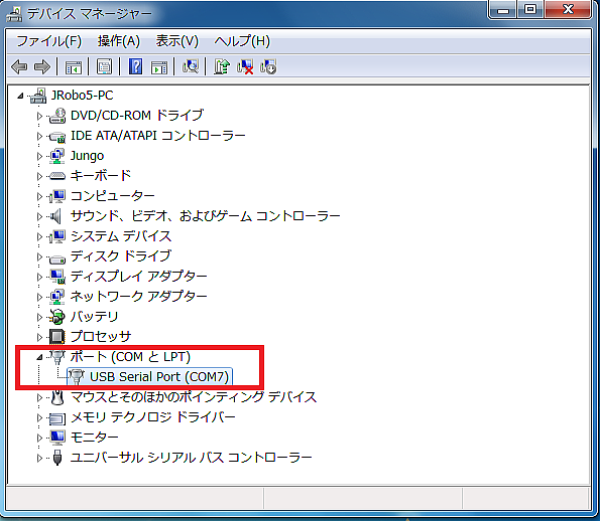
�@�@�@�@��L�̏ꍇ�́ACOM�V�ɐݒ肳��Ă��܂��B
�@
�@�@�@�@�y�P�z�ϊ��R�l�N�^�ƁA���W���[���d��
�@�@�@�@�@�܂��A���{�b�g���̃V���A���ʐM�|�[�g�i RS232C �F D-sub 9 pin �j���A���X�E�R�l�N�^�ƂȂ��Ă��܂����AXBee ���W���[���̃R�l�N�^�����X
�@�@�@�@�Ȃ̂ŁA��t���o���܂���B�@�@�����ŁA�ϊ��R�l�N�^���������܂��B
�@�@�@�@���̕ϊ��R�l�N�^�Ƃ��āA�W�F���_�[�`�F���W���[�i D-sub 9 pin �I�X-> D-sub 9 pin ���X �j�𗘗p���ă��W���[�����R�l�N�^���I�X�s���ɕϊ�
�@�@�@�@���܂��B
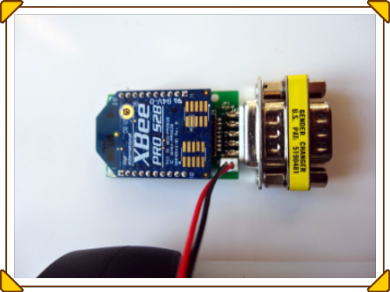
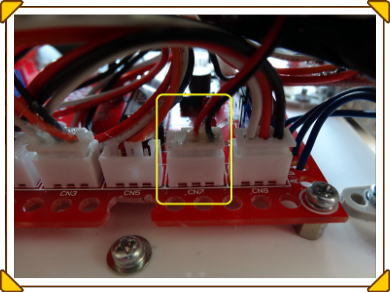
�@�@�@�@�@�@�@�@�@�@�W�F���_�[�`�F���W���[�����t������ԁ@�@�@�@�@�@�@�@�@�@�@���o�̓R�l�N�^����AXBee���W���[���̓d�������܂��B
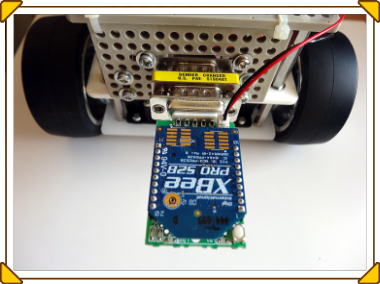
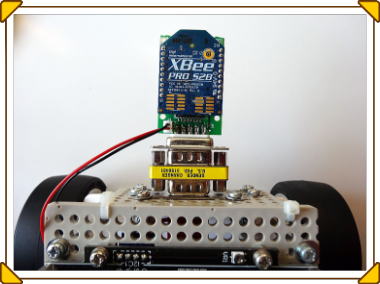
�@�@�@�@�@�@�@Robot ��RS232C�|�[�g�Ƀ��W���[�������t������ԁ@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�㕔���猩�����
�@�@�@�@�y�Q�z�ʐM���x�̕ύX
�@�@�@�@�@���W���[���̕W���ʐM���x�́A9600 �{�[�ł����A���{�b�g�i TJ3B �j�̒ʐM���x�́A115200 �{�[�ƂȂ��Ă��܂��B
�@�@�@�@�@���������āA��������킹�Ȃ��ƒʐM������ɏo���܂���B�@����́A������ 115200 �{�[�ɍ��킹�܂��B
�@�@�@�@�@�܂��́A��������{����ׂ̃\�t�g�E�G�A�i �ݒ�\�t�g�E�G�A �j����肵�܂��B
�@�@�@�@�@������@�́ADIGI �T�C�g����AX-CTU ���_�E�����[�h���܂��B�i ���LURL �j
�@�@�@�@�@�@http://www.digi.com/support/productdetail?pid=3352&osvid=0&type=drivers
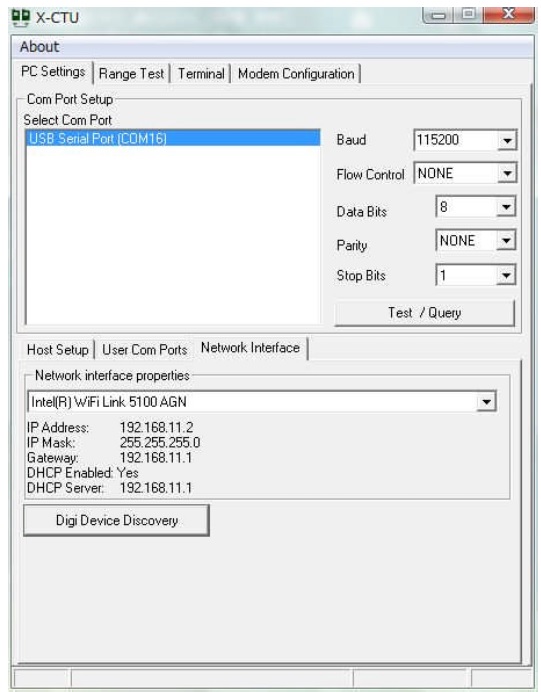
�@�@�@�@�@�@�@�@�@�@�@�@Baud �F 115200 �ɐݒ肵�܂��B
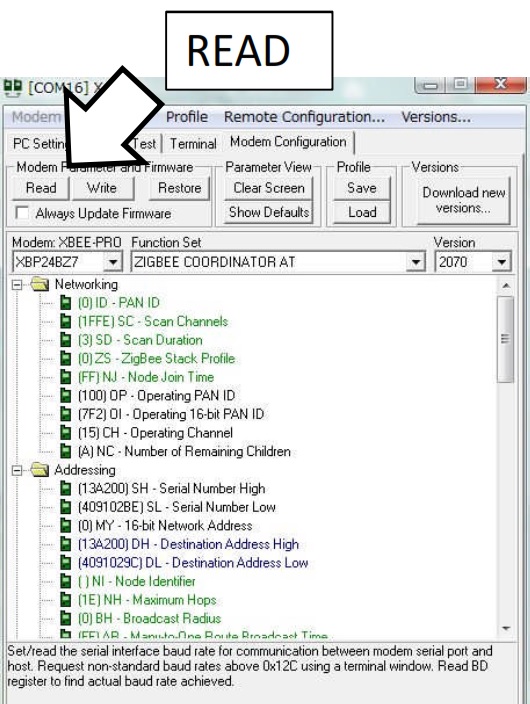
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�uRead�v�{�^���������B
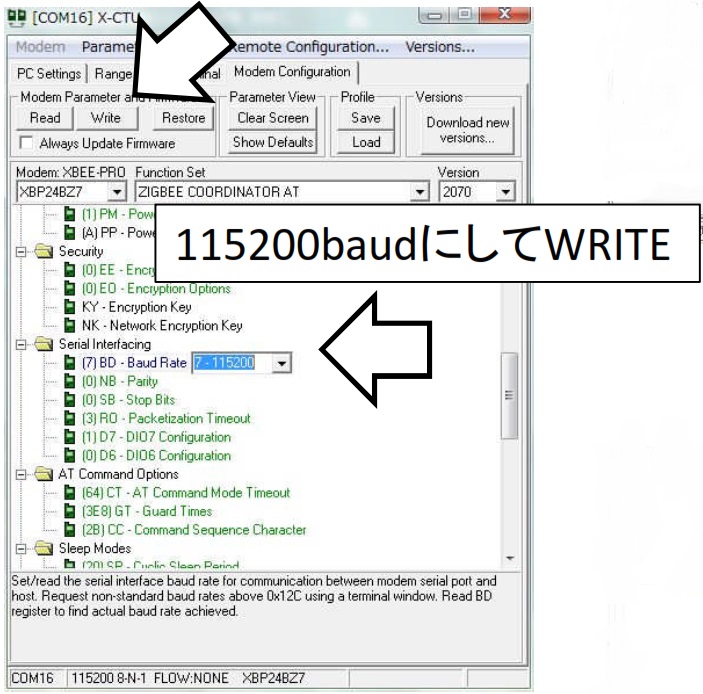
�@�uSerial Interfacing�v���́uBD-Baud Rate�v��
�@�@115200 �ɐݒ肵�āuWrite�v�{�^���������܂��B
�@�@�@�@�y�R�z�ϊ���i�W�F���_�[�`�F���_�[�j�Ή��̃s���z�u�����o�[�X������B
 �@
�@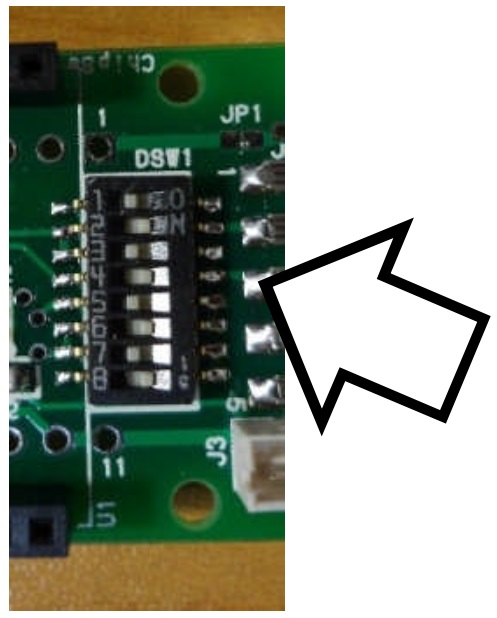
�@�@�@�@XBee ����O���āA�f�B�b�vSW�� 2, 4, 6, 8 �� ON �ɕύX���܂��B
�@�@�@�@�y�S�zC-Style ��ł̎g�p���@

�@�@�@�@�v���O�������ɁAC �R�[�h�� put_sensor( )�G���߂��L�q����� �eCH�̃Z���T�̒l�𑗐M���܂��B
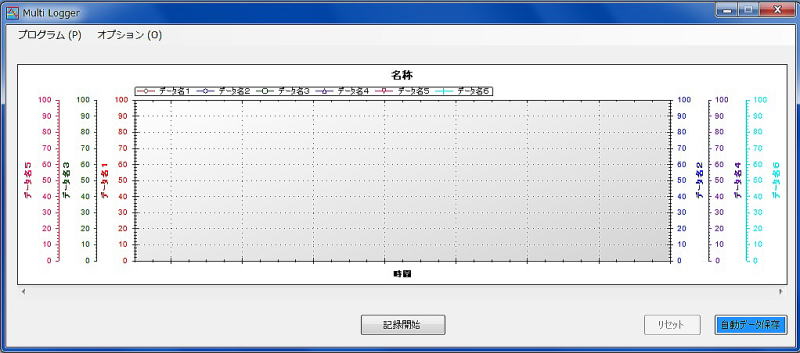
�@�@�@�@�y�T�z�f�[�^���K�[�𗧂��グ�����C����ʁi �\��CH���A�UCH�� �j
�@�@�@�@�@TJ3B �� CH1 �` CH10 �̔C�� CH ��I�����鎖���o���܂��B< �ő�CH �F �P�OCH ��
�@�@