�����̉Ȋw�Z�p���q�������ɑ����B�@�W���j���{�@��JRO��
��619-0237 ���s�{���y�S���ؒ�����W����
TEL. 070-5263-2200
jun@kinet-tv.ne.jp
�y ��Əꏊ �z���߂ɁI�IRECRUI
�@�@�@���̃R�[�i�[�́A�����ȃZ���T������pRobot�Ɏg����悤�ɂ��Ă݂���A�V�����Z���T���ȒP�ɋ���Robot�ɐڑ�
�@�@�ł���C���^�[�t�F�[�X�������Ă݂��Əꏊ�ł��B
�@�@�����̍�Ƃ��s���ׁA�Z�p�A�h�o�C�U�[�Ƃ��āA�k�C���ݏZ�̑哒����ɂ��肢���Đi�߂čs���܂��B
�@�@�哒�����HP�@�F�@http://okgnz.web.fc2.com/index.htm
�@�@�����ŏЉ�Ă�����e���ׂĂɊւ��ẮA�哒����ɔŌ�������܂��̂Ŗ��f�]�p���֎~���Ă��܂��B
�����g�����Z���TRECRUI
�@�@�@����pRobot �p�̕W���Z���T�́A�i�ԁFPING �Ƃ��Č��݂̒艿�� \3,500�|�����N�O�́�5,500-���ł��B
�@�@�ʏ�A���Z�pRobot�ɂ͐��i3��~6�j�g���܂��̂ŁA�����g�Z���T������1���~�ȏォ�����Ă��܂��܂��B
�@�@���ʁA�l�b�g�Œ��ׂ�Ɛ�����@���قȂ���̂ł���Γ����\�ŁA�P�^�P�O�ȉ��ōw�����鎖���\�Ȃ̂ŁA�Ȃ�Ƃ�
�@�@�t����H��t���Ă� ��5,000-�ȉ��i4�̃Z���T�t��:�P�[�u���E�R�l�N�^�ʁj��ڕW�ɐ��삵�����Ǝv���܂��B


�@�@�@�哒����̃A�h�o�C�X�ŁA�t����H�i�����H�j�ɂ́AAVR�}�C�R�����g���ċ���pRobot�ɂȂ��Ă݂܂��B
�@�@1��� Robot �� 2�̃}�C�R�����K�v���ƍl���܂����AAVR�}�C�R���́A\100�^���x�Ȃ̂�1�̋@�\���d�q���i��
�@�@�l���������������Ă��܂��B
�@�@�܂����G�Ȑ���Ƃ��A�C���^�[�t�F�[�X�̓���Ƃ������ʂ�AVR�}�C�R���ɒS��������Ƃ������ŁA����pRobot�{�̂�
�@�@���S�������Ȃ����A���o�͂̋K�i�̓��ꂪ�\�ƂȂ�܂��B
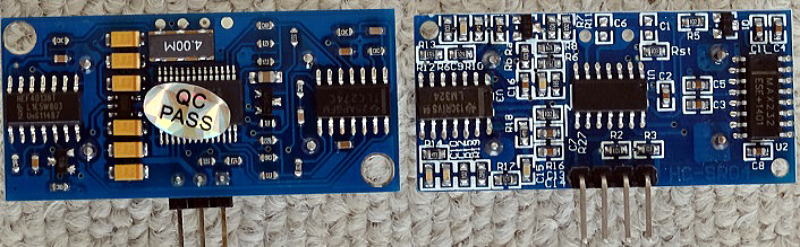
�@�@�@�g�p���钴���g�Z���T�́ASainSmart�Ђ� HC-SR04 ��190-�` \500- ( �ʎY�w���E�~���[�g�ϓ� )���g���Ă݂܂��B
�@�@�W���i�́A�Z���T�̓��o�̓s����3�{�i���d���Q�{�j�ł����AHC-SR04�́A4�{�i���d���Q�{�j�ƂȂ��Ă��܂��B
�@�@�@���}�́AHC�|SR�O�S�i�S�{���^�C�v�F���͂P�{�A�o�͂P�{�j�́A�^�C�~���O�`���[�g�ł��B
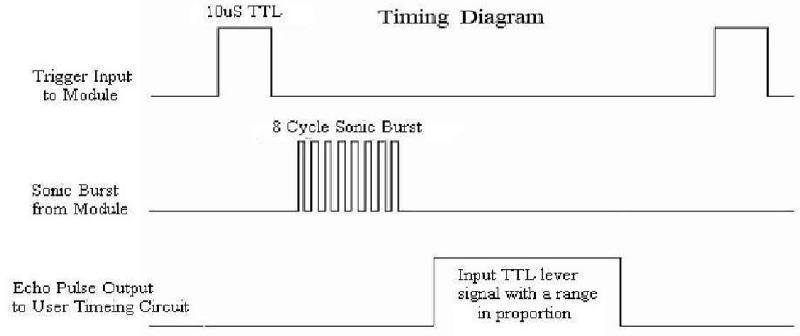
�@�@�@�@ �O������P�O�ʂ��̃g���K�[�p���X���A�Z���T�֏o�͂��܂��B
�@�@�@�A �Z���T�́A��L�g���K�[�p���X�ɂ��A���M���W���[������ �S�O��Hz �̎��g���̃p���X�� 8 �g �o�͂��܂��B
�@�@�@�B �Z���T���甭�M���ꂽ�����g�́A��Q���ɂ͂˕Ԃ��ăZ���T�̎�M���W���[���ɋA��܂��B
�@�@�@�C �Z���T����̏o�͒[�q�i Echo Pulse Output )�ɂ́A�����ɔ�Ⴕ���p���X�����������M�����o�͂���܂��B
�@�@�@�D �������ʂ��^�T�W �Ōv�Z����ƁA���ۂ̋������Z�o����܂��B
�@�@�@�E �g���K�[�M���̍ŒZ�Ԋu�́A�U�O�����ȏオ�K�v�ł��B�i���̊Ԃɑ��̃Z���T���g���K�[���č�������}��B�j
�@�@�W���Z���T�iPING�j�́A���o�̓s����1�{�ׁ̈A1�{�̐M���������o�͂ƂȂ莞�ԍ���ւ������Ă��܂��B
�@�@�]���āA�P��̃��{�b�g�iPIC�}�C�R���j�ɂ́A�ő�S�����ڑ��ł����ڑ��|�[�g���Œ肳��Ă��܂��B
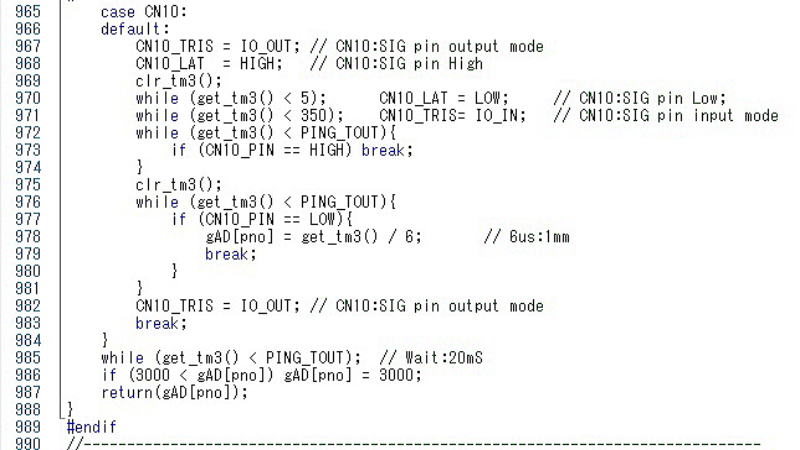
�@�@���L�̃v���O�����́ATJ3B��PING���R���g���[�����Ă��镔���ł��B�i PING �� CN10 �ɐڑ����Ă���j
�@�@�������Z�́A�p���X�����v������̂ł͂Ȃ�DA�R���o�[�^�[�ɂ��A�i���O�ɕϊ����Ă��܂��B
�����g�Z���T�����̐���i�����jRECRUI
�@�@�@��L�̗l��TJ3B�W���Z���T�iPING�j�ł́ATJ3B �� PIC ���œ��o�͂��ւ��Đ��䂵�Ă��܂��B
�@�@����́ATJ3B �W���� PING ���g�킸�Ƀ��[�R�X�g�Ȓ����g�Z���T���g���̂ŊO���ɃZ���T���䂷���H���K�v�ƂȂ�܂��B
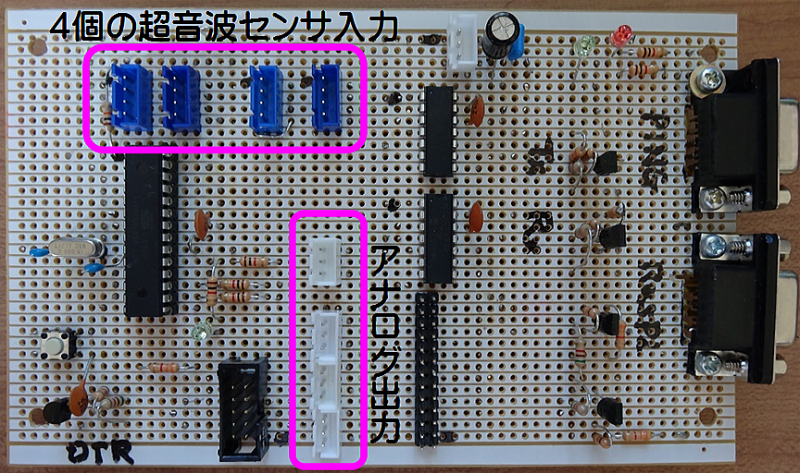
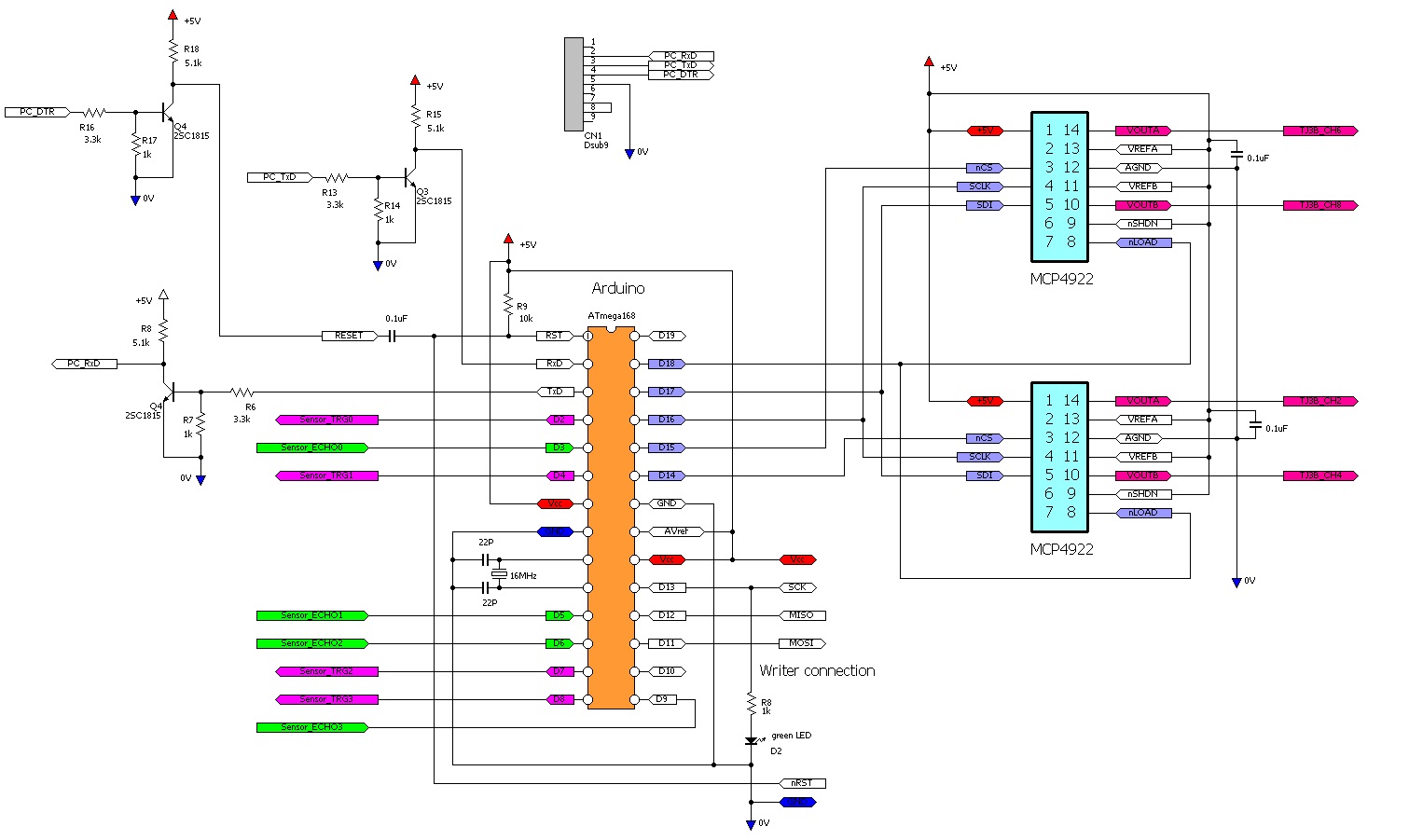
�@�@���̐����H��AVR�}�C�R�����g���ĂS�i�ő�j�̃Z���T��ڑ����A����Ƌ����l�ɔ�Ⴕ���A�i���O�l���o�͂���
�@�@��삵�܂��B
�@�@
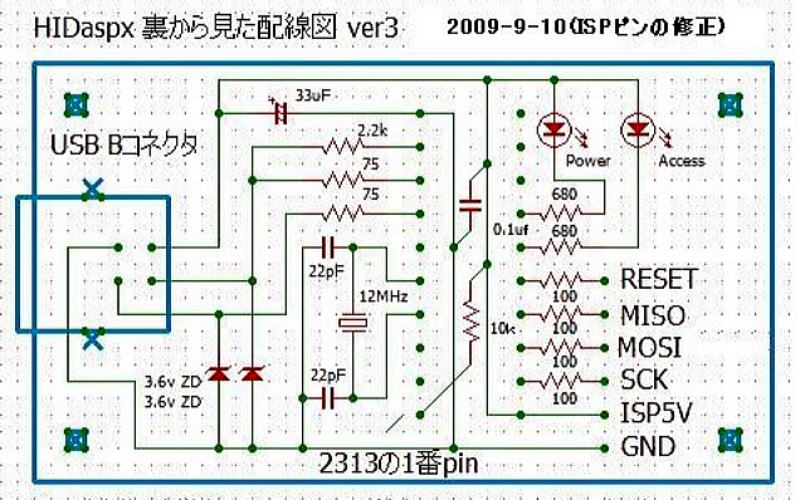
�@�@��L��H�}�A���i��������Writer Connection ������܂����A�����AVR�ւ̏����݊�ւ̐ڑ��R�l�N�^�ł��B
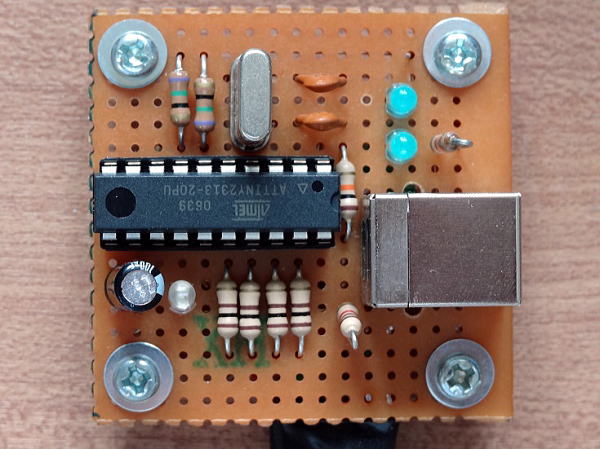
�@�@AVR�����݊��H�́A�u��H�[�~�vHP�Ɍf�ڂ���Ă����H���̂܂܂ł��B
�@�@
�@�@�R�l�N�^�ڑ��i�s���A�T�C���j�͉��L�̒ʂ�ł��B
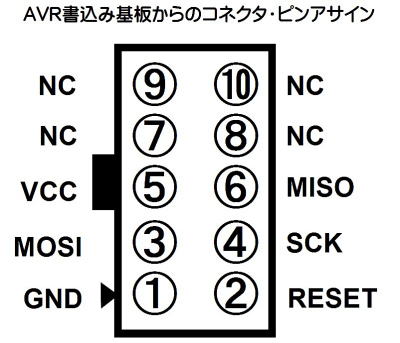
NC �F Non-contact�i�ڑ�����Ă��Ȃ��j
VCC �F DC�{�TV
�@�@�ĂсAAVR�}�C�R����̐���ɐ�����߂��܂��B
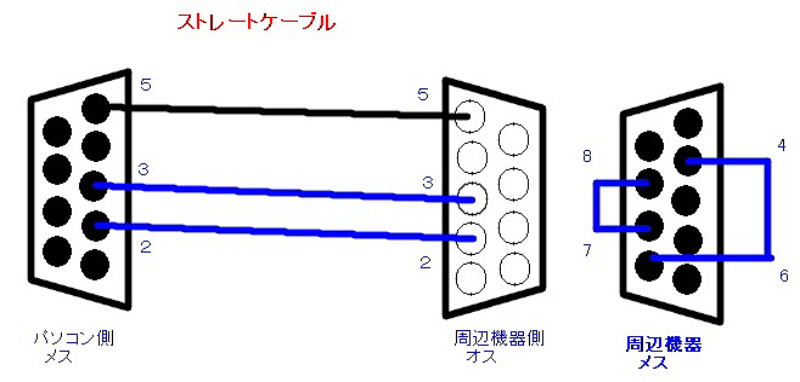
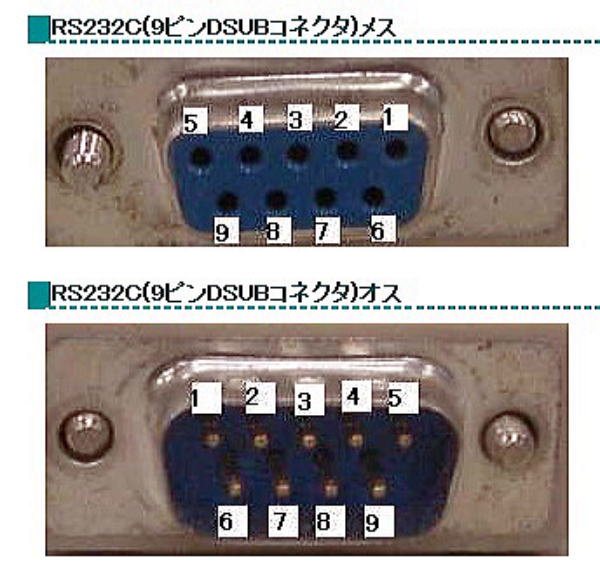
�@�@���̊�ɂ́ARS232C�R�l�N�^�[���Q�� AVR�[PC�ARasp Pi�[PC �����t���Ă���܂����ARS�Q�R�QC�W��
�@�@�Q�l���������ăn���_�t�������܂��B

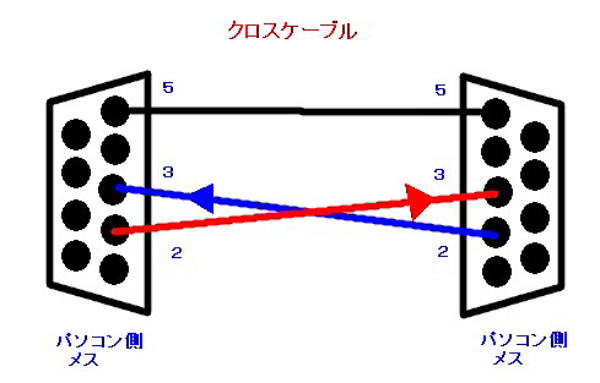
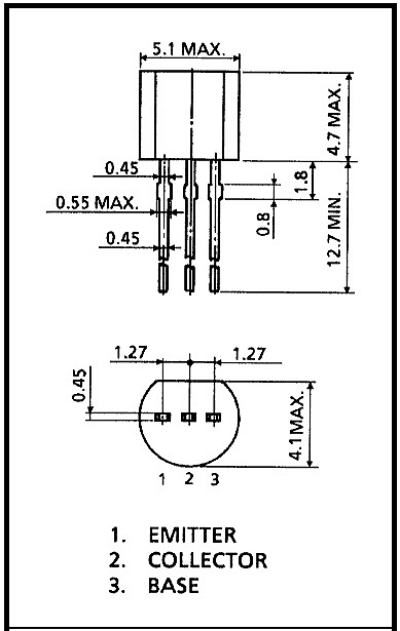
�@�@����́ARS232C RxD�ATxD �� Tr�i �g�����W�X�^ �j���g���Ă��܂��BTr �̑��͉��}�̗l�ɂȂ��Ă��܂��B
�@�@���́ATr �������猩�Ă���̂ŁA�ԈႢ�������悤�ɂ��܂��傤�B
�@�@�R���f���T�̕\���̓ǂݕ��́A���E�}�̂悤�ɂȂ��Ă��܂��B�i�g��j
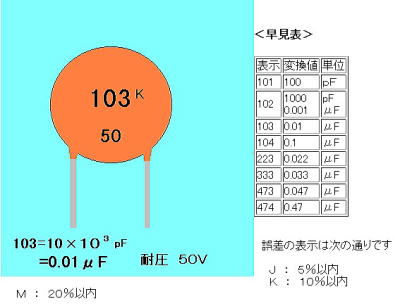
���{���Ŕ̔�����Ă��镨�́A��ʂɃ����N �fZ�f �������B
�����N �fZ�f �́A�\���e�ʂ� -20% �` +80% �ƌ덷��ł�
���A���������g�p���邤���ł́A���܂���ɂ͂Ȃ�܂���

AVR�}�C�R���ɁuBoot Loader�v����������RECRUI
�@�@�@�g�p���Ă���AVR�́AATmega168 ���g���Ă��܂��BAtmega168 �͓����Ƀt���b�V��ROM�������Ă���
�@�@���������A�������݂��o���܂��B
�@�@�@�t���b�V��ROM�̒��ɁA�uBootloader�v���������ݓd����ON����ƁuBootloader�v����P�O�b�Ԃ���
�@�@���삵�ĊO������̃t���b�V��ROM�ɏ������ރf�[�^��҂��܂����A���̊Ԃɏ������݃f�[�^�����Ȃ���
�@�@�A�������t���b�V��ROM���Ɏ����Ă���v���O���������s���܂��B
�@�@�@����g�p����uBootloader�v�́AATmegaBOOT_168_diecimila.hex ���g���܂��B
�@�@��L ATmegaBOOT_168_diecimila.hex ���������ވׂɁuhidspxG�v���g���܂��B�uhidspxG�v��CUI�\�t�g
�@�@��hidspx �� GUI���������̂Ł�USB��HID�N���X�𗘗p���Ă��܂��B
�@�@HID�N���X�́AHuman Interface Device �������̂�OS��USB���T�|�[�g���Ă���A���ʂȃh���C�o��
�@�@�C���X�g�[�����Ȃ��Ă��g�p�ł��܂��B
�@�@�ȉ��@�uhidspxG�v�C���X�g�[���菇�ł��B
�@�@�l�b�g�ォ��A�uhidspx-2012-0326�v���_�E�����[�h���܂��B
�@�@�ŋ߂́A�����ƐV������������܂����g������ł����ČÂ����̂��_�E�����[�h���Ă��܂��B
�@�@��L�t�@�C�����𓀂��܂��B
�@�@�𓀌�̃t�@�C�����e�ł��B
�@�@�Z�b�g�A�b�v�̎��s�ł��B
�@�@�Z�b�g�A�b�v�iSTEP�P�j
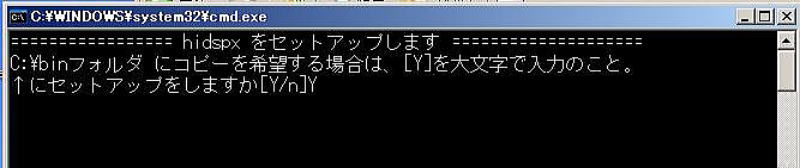
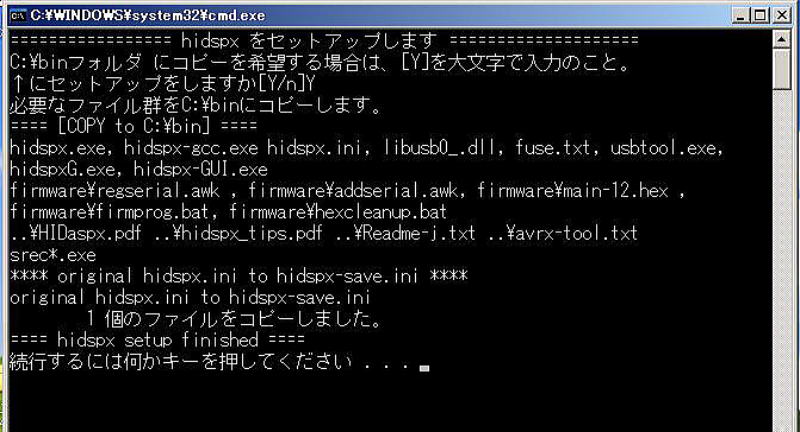
�@�@�Z�b�g�A�b�v�iSTEP2)
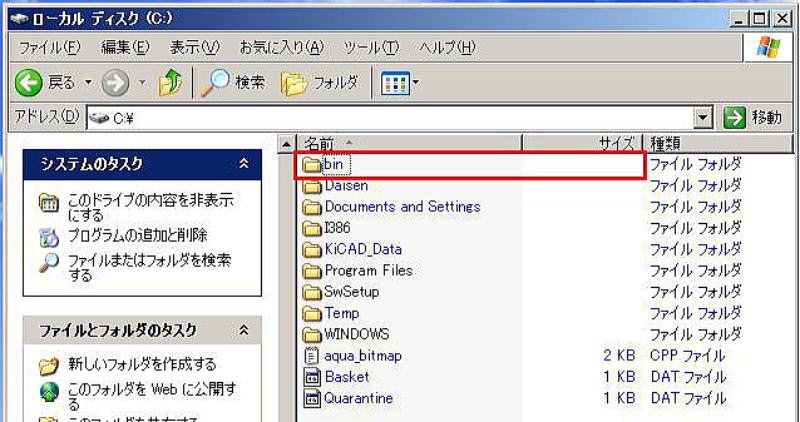
�@�@C:\bin �t�H���_�[������܂��B
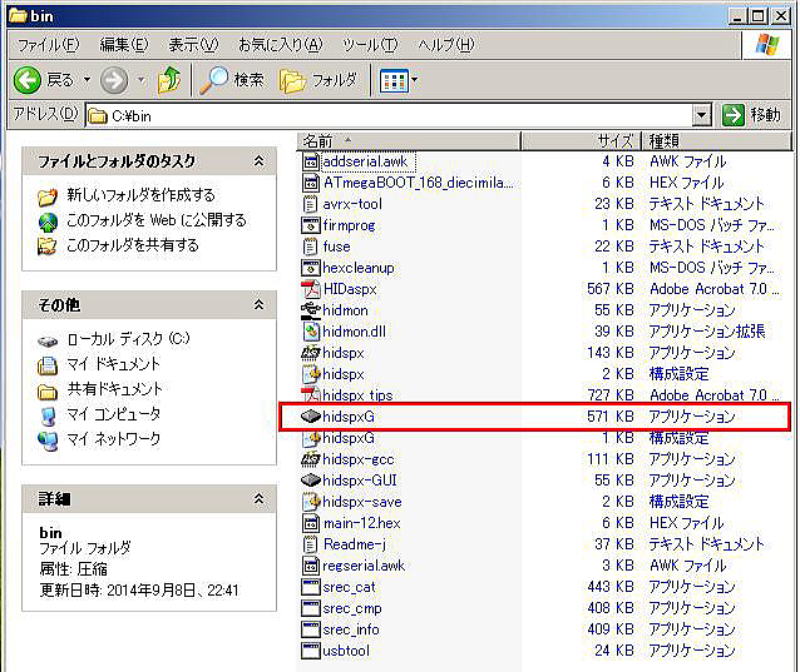
�@�@C:\bin ���� hidspxG ���s�t�@�C����I��
�@�@hidspxG �����オ���ʁ@��Flash�i*.hex�j�ցuATmegaBOOT_168_diecimika.hex�v��ǂݍ��݁�
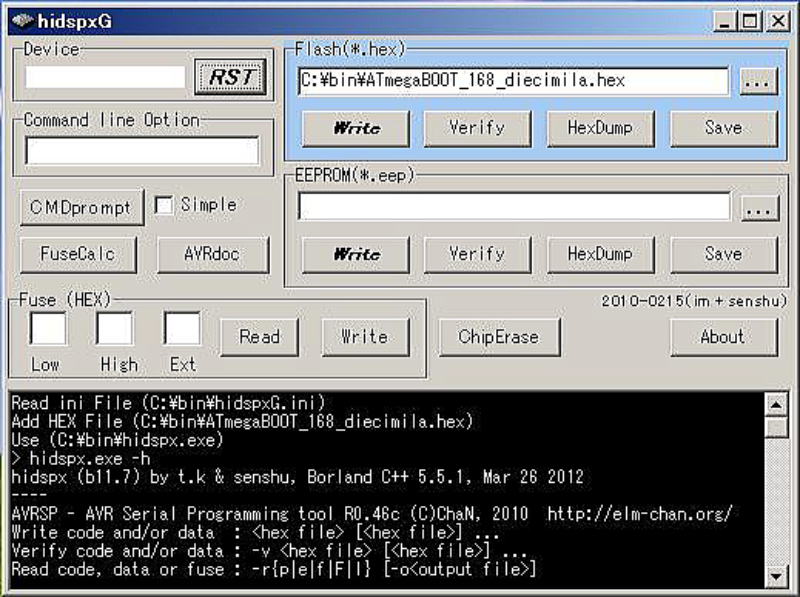
�@�@RST �{�^����������Device���ɐڑ����Ă���f�o�C�X�����\�������B
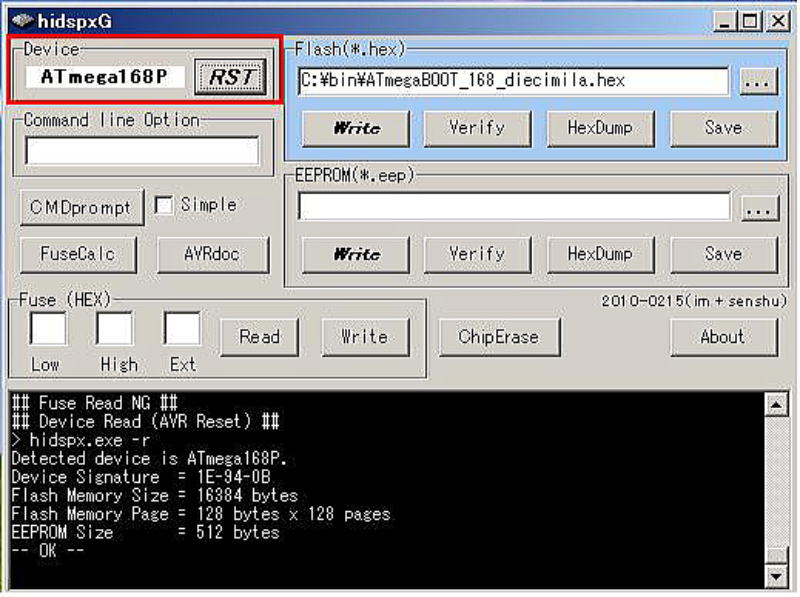
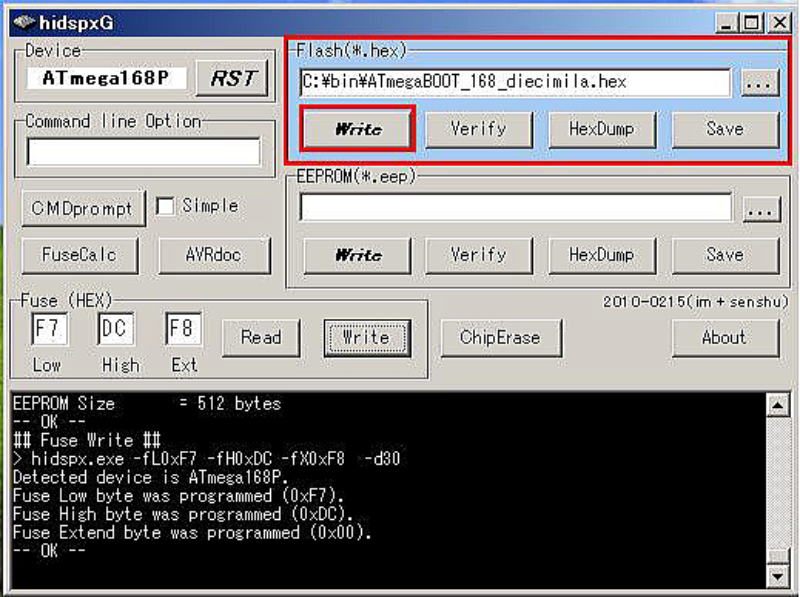
�@�@�f�o�C�X���m�F�o������A�܂��t���[�Y�r�b�g�̏������݂����܂��B
�@�@AVR�}�C�R���ɂ́AFuse Bits �̏������݂��K�v�ł��B����ɂ��AVR�̓�����H�̊e��ݒ���s���܂��B
�@�@����́A�������ɉ��L�̗l�ɐݒ肵�Ă��������B
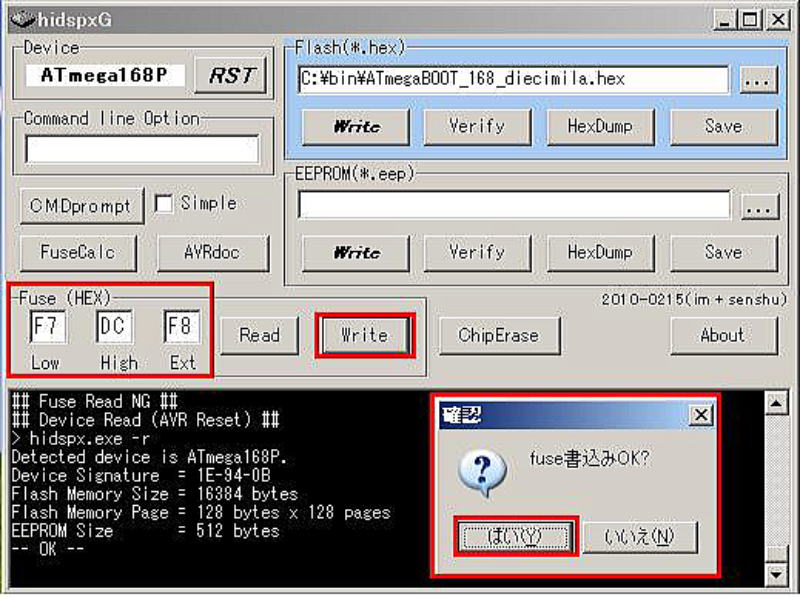
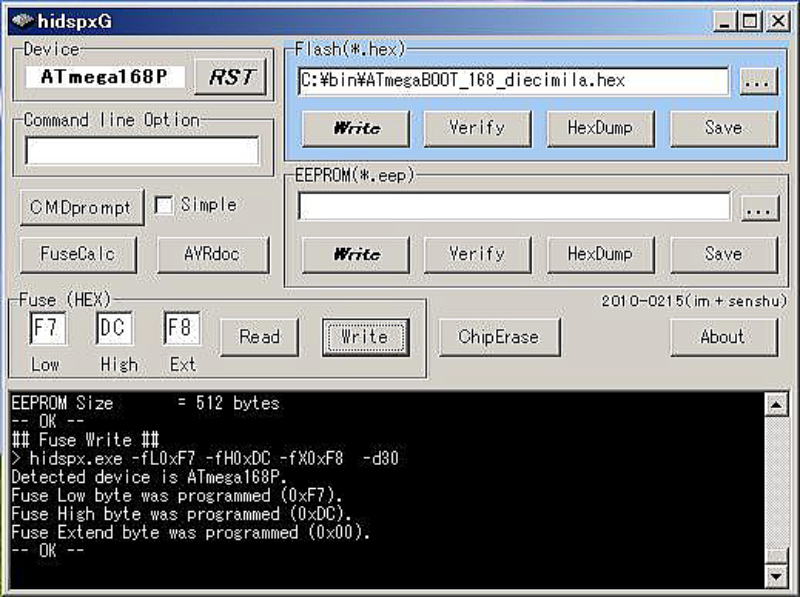
�@�@�������݂�����ɏI���������́A�ʼn��i�̏o�͑��ɕ\������܂��B
�@�@�O�ׁ̈AAVR �� Fuse Bits ���m�F����ꍇ�́A�ׂɂ��� Read �{�^���������Ċm�F���ł��܂��B
�@�@���ɁAFlash(*.hex)�ɂ���uATmegaBOOT_168_diecimila.hex�v��AVR�ɏ������݂܂��B
�@�@�������݂��n�܂�ƁA���i�ɂ���o�͑��ɐi�s��Ԃ��\������܂��B
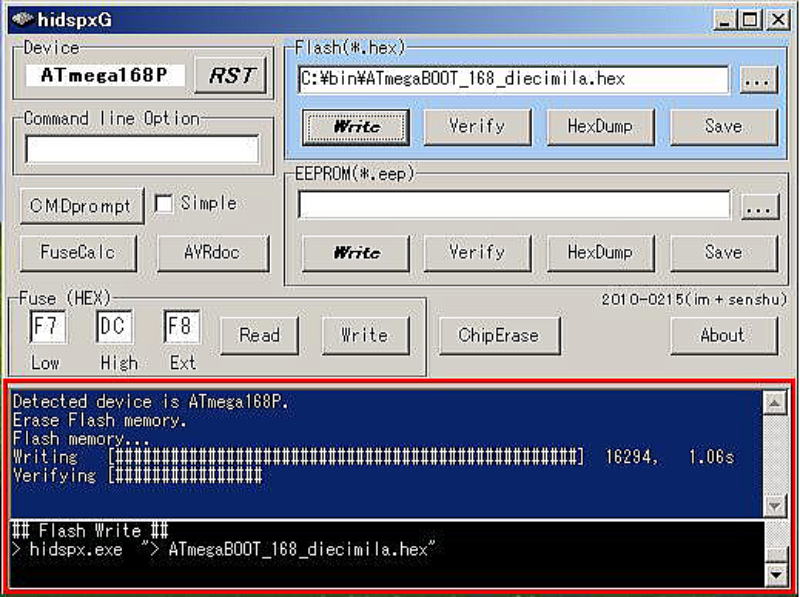
�@�@�������݂��I������ƁAVerifying �����s���ꏑ�����݂̊m�F���s��ꖳ���I�������OK>�\��
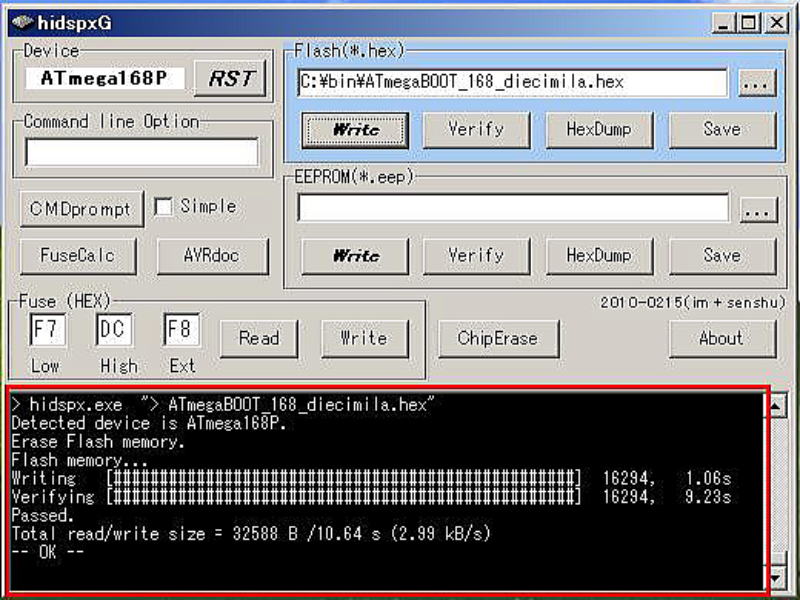
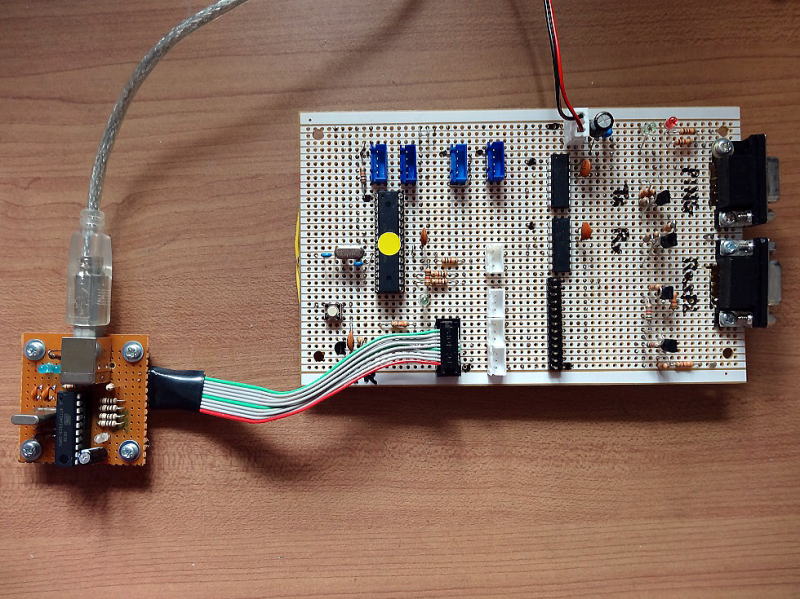
�@�@�������݊�����O���āA�E���� RS232C �̃R�l�N�^��USB-RS232C�ϊ��P�[�u����ڑ����܂��B

�@�@ 

�uArduino�v�ŁA�v���O�����쐬�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@RECRUI
�@�@�S�`���l�������g�����Z���T����v���O�����d�l���X�P�b�`�d�l��
�@�@�� �X�P�b�`�T���d�l
�@�@�@�� �ڑ��s��
�@�@�@�@�e�`���l���Ɛڑ��ԍ��̊W�����͕���
�@�@�@�@PING �`���l���ԍ��@�@AVR�s�����@�@AVR�s���ԍ��@�@PING�s����
�@�@�@�@�@�@�`���l�� �O�@�@�@�@�@D2�@�@�@�@�@�@�@�R�@�@�@�@�@TRG �O
�@�@�@�@�@�@�`���l�� �O�@�@�@�@�@D3�@�@�@�@�@�@�@�S�@�@�@�@�@ECHO �O
�@�@�@�@�@�@�`���l�� �P�@�@�@�@�@D4�@�@�@�@�@�@�@�T�@�@�@�@�@TRG �P
�@�@�@�@�@�@�`���l�� �P�@�@�@�@�@D5�@�@�@�@�@�@�@�U�@�@�@�@�@ECHO �P
�@�@�@�@�@�@�`���l�� �Q�@�@�@�@�@D6�@�@�@�@�@�@�@�V�@�@�@�@�@ECHO �Q
�@�@�@�@�@�@�`���l�� �Q�@�@�@�@�@D7�@�@�@�@�@�@�@�W�@�@�@�@�@TRG �Q
�@�@�@�@�@�@�`���l�� �R�@�@�@�@�@D8�@�@�@�@�@�@�P�S�@�@�@�@�@TRG �R
�@�@�@�@�@�@�`���l�� �R�@�@�@�@�@D9�@�@�@�@�@�@�P�T�@�@�@�@�@ECHO �R
�@�@�@�@�e�`���l���Ɛڑ��ԍ��̊W���o�͕���
�@�@�@�@DAC�s�����@�@�@�@�@�@AVR�s�����@�@�@�@AVR�s���ԍ�
�@�@�@�@DAC0_��CS�O�@�@�@�@�@�@D�P�S�@�@�@�@�@�@�@�Q�R
�@�@�@�@DAC0_��CS�P�@�@�@�@�@�@D�P�T�@�@�@�@�@�@�@�Q�S
�@�@�@�@�r�b�j �@�@�@�@�@�@�@�@�@ D�P�U�@�@�@�@�@�@�@�Q�T
�@�@�@�@DI �@�@�@�@�@�@�@�@�@�@�@�c�P�V�@�@�@�@�@�@�@�Q�U
�@�@�@�@nLOAD�@�@�@�@�@�@�@�@�@�c�P�W�@�@�@�@�@�@�@�Q�V
�@�@�@�@�`���l�� �O�A�P �́ADAC�O_nCS0 ���uL�v�ɂ��ăA�N�Z�X�B
�@�@�@�@�`���l�� �Q�A�R �́ADAC�O_nCS1 ���uL�v�ɂ��ăA�N�Z�X�B
�@�@�@�@�`���l���ɗp�ӂ���Ă��郌�W�X�^�ɁA����]������ׁA�N���b�N�iSCK)�A�f�[�^�iDI)�A���[�h�i��LOAD)�𗘗p���܂��B
�@�@�@�@����m�F���j�^�[LED�́A��Ԃ�D13�i�P�X�j�ɐڑ����Ă��܂��B
�@�@�@�� Loop ����
�@�@�@�@�P�Q�O�������ƂɁA�C�x���g�g���K�[�����A�u�v���v�|�u�v�Z�v�|�u�d���o�́v���S��J��Ԃ��B
�@�@�� �X�P�b�`�ڍd�l
�@�@�@�� ���荞��
�@�@�@�@���荞�݂́A�^�C�}�[���荞�݂������g�p�B
�@�@�@�@MsTimer2 ���C�u�����𗘗p���A�u�P�Q�O�����v���ƂɃg���K�[�t���O���Z�b�g����Ɠ�����LED��_�ł�����B
�@�@�@�@���荞�݃n���h���́A�� update_trigger ���S���B
�@�@�@�@LED�_�������́A�� send_led ���S���B
�@�@�@�� �v��
�@�@�@�@�����g�����Z���T�Ƀg���K�[��^���A�g�ݍ��݊� pulseln �� ECHO �̎��Ԓ��𑪒�B
�@�@�@�@�`���l���Ԃ̃C���^�[�o���́A�u�Q�R�����v�قǁApulseln �Łu�P�R�����v�A����㏈���Ɂu�Q�����v�A���̃`���l���̃g���K�[�ɂ�锽�˔g��
�@�@�@�@�e�����Ȃ�����ׂɁu�W�����v�̊Ԋu���J���Ă��܂��B
�@�@�@�@�g���K�[�o�͂́A�� send_trg ���S���B
�@�@�@�@�p�����[�^�́A�`���l���ԍ��i �O�|���R �j�Ƃ����B
�@�@�@�� �v�Z
�@�@�@�@�G�R�[����ŁA�S�`���l�����̎��Ԃ�ۑ����Ă����A���Ԃ��狗���ɕϊ��B
�@�@�@�@���Ԃ��狗���ւ̕ϊ��́A�� convertv ���S���B
�@�@�@�@���̂܂ł̋������u�S�O�O�����v�̂Ƃ��A�u�S�O�O�O�v�Ƃ���B
�@�@�@�@�u�S�O�O�v�Ƃ��Ȃ��̂́A���������_�v�Z�ɂ�鎞�ԏ����DAC�o�͂̐��l�ϊ��덷�������Ȃ����邽�߁B
�@�@�@�� �d���o��
�@�@�@�@�ЂƂO�̌v���ƈقȂ�ƌv�Z����B
�@�@�@�@��������d���ւ̕ϊ��́A�� calcx ���S���B
�@�@�@�@�@�� calcx �́A�������P�U�r�b�g�����Ȃ������œ��͂��A�v�Z���ʂ��P�U�r�b�g�����Ȃ������ŏo�͂���B
�@�@�@�@�d���o�͂́A�� send_dac ���S���B
�@�@�@�@�@�� send_dac �́A�P�O�̋����ƈقȂ�Čv�Z���āA�S�`���l�����̓d�����o�͌�A�� send_dac_primitive
�ɏ��]�����ϑ��B
�@�@�� ���d�l
�@�@�@�� update_trigger
�@�@�@�@�@�^�C�}�[���荞�ݔ������̏������L�q�B
�@�@�@�@�@�@���̓p�����[�^�@�F�@�Ȃ�
�@�@�@�@�@�@�o�̓p�����[�^�@�F�@�Ȃ�
�@�@�@�@�@�@�C�x���g�t���O���Z�b�g��A���j�^�[LED��_�ŁB
�@�@�@�@�@�@���j�^�[LED�̓_�ł́A�� send_led �𗘗p�B
�@�@�@�@�@�@�C�x���g�t���O�ɂ́Aeflag �𗘗p�B
�@�@�@�@�@�@�o�̓p�����[�^���g���Ȃ��̂ŁAeflag ���O���[�o���ϐ��Œ�`����B
�@�@�@�@�@�@���j�^�[LED�̓_�ł́A�J�E���^ xcnt �̍ʼn��ʃr�b�g�̒l�𗘗p�B
�@�@�@�� send_led
�@�@�@�@�@���j�^�[LED�̓_�Ő���B
�@�@�@�@�@�@���̓p�����[�^�@�F�@�_���A�����w��̂P�r�b�g
�@�@�@�@�@�@�o�̓p�����[�^�@�F�@�Ȃ�
�@�@�@�@�@�@�_���A�����̔�������AArduino ��D13�s���ɁA�P �� �O ���o�́B
�@�@�@�� send_trg
�@�@�@�@�@�����g�����Z���T�� TRG �̃p���X���o�́B
�@�@�@�@�@�@���̓p�����[�^�@�F�@�����g�����Z���T�̔ԍ��i 0 ~ 3 �j
�@�@�@�@�@�@�o�̓p�����[�^�@�F�@�Ȃ�
�@�@�@�@�@�@�Ή��s���� 1 ���o�͌�A�P�P�ʂ���� 0 �ɖ߂��B
�@�@�@�� get_duration
�@�@�@�@�@�����g�����Z���T��ECHO �p���X�̎��Ԓ����v���B
�@�@�@�@�@�@���̓p�����[�^�@�F�@�����g�����Z���T�̔ԍ��i 0 ~ 3 �j
�@�@�@�@�@�@�o�̓p�����[�^�@�F�@���Ԓ��i 32�r�b�g�����Ȃ����� �j
�@�@�@�@�@�@�Ή��s���� H �p���X�̎��Ԃ��v���B
�@�@�@�@�@�@Arduino �̑g�ݍ��݊��� pulseln �𗘗p�B
�@�@�@�@�@�@�u�P�R�����v�Ń^�C���A�E�g����B
�@�@�@�@�@�@�^�C���A�E�g�܂ŁAH �p���X�����B���Ȃ��ƃ[���Ƃ���B
�@�@�@�� convertv
�@�@�@�@�@���Ԓ��������Ɋ��Z
�@�@�@�@�@�@���̓p�����[�^�@�F�@���Ԓ��i 32�r�b�g�����Ȃ����� �j
�@�@�@�@�@�@�o�̓p�����[�^�@�F�@�����̂P�O�{�i 16�r�b�g�����Ȃ����� �j
�@�@�@�@�@�@�f�t�H���g�́A�u�S�O�O�O�v
�@�@�@�@�@�@���Ԓ��� �u2352.7�ʂ��v�̎��A�u�S�O�O�O�v�ɂȂ�l�Ɍv�Z�B
�@�@�@�@�@�@���͂��u�O�ʂ��v���傫���A�u2353�ʂ��v������鎞�Ɍv�Z�B
�@�@�@�� calcx
�@�@�@�@�@������d���Ɋ��Z
�@�@�@�@�@�@���̓p�����[�^�@�F�@�����̂P�O�{�i 16�r�b�g�����Ȃ����� �j
�@�@�@�@�@�@�o�̓p�����[�^�@�F�@���Z�l�i 16�r�b�g�����Ȃ����� �j
�@�@�@�@�@�@�W���i 4096�^5000 �j����Z
�@�@�@�� send_dac
�@�@�@�@�@�d���l���o��
�@�@�@�@�@�@���̓p�����[�^�@�F�@�Ȃ�
�@�@�@�@�@�@�o�̓p�����[�^�@�F�@�Ȃ�
�@�@�@�@�@�@�ЂƂO�̑���l�ƈقȂ�A�X�V��������d�����Z�l�ɕϊ��B
�@�@�@�@�@�@�����d���l���Z�́A�� calcx �𗘗p�B
�@�@�@�@�@�@���]����]����A�d���o�͂��w���B
�@�@�@�� send_dac_primitive
�@�@�@�@�@DAC�ɏ���]���B
�@�@�@�@�@�@���̓p�����[�^�@�F�@DAC�ԍ��i 0 ~ 3 �j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�l�P�@�i 16�r�b�g�����Ȃ����� �j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�l�Q�@�i 16�r�b�g�����Ȃ����� �j
�@�@�@�@�@�@�o�̓p�����[�^�@�F�@�Ȃ�
�@�@�@�@�@�@DAC�́A�f�o�C�X�� �Q ���W�X�^�����̂ŁA�l�P�A�l�Q�Ŏw�肷��B
�@�@�@�@�@�@�Q���W�X�^�́AA,B �ƂȂ��Ă���̂Œl�P��A���W�X�^�ɓ]���A�l�Q��B���W�X�^�ɓ]������B
�@�@�@�d�l�����܂������ŁAPC�� Arduino ���C���X�g�[�����܂��B
�@�@�@�𓀌�A�t�H���_�[���� arduino.exe ��I�����܂��B

�@�@�@Arduino �̉�ʂł��B
�@�@�@�����܂ŏ�������������A���Ƃ͎d�l���Ɋ�Â��uArduino�v�v���O�������쐬���čs���܂��B
�@�@�@��������́A���̃y�[�W�ֈړ����܂��B
�@�@ ![]()
![]()